2.1 Sistemes intel·ligents robotitzats
Participants: J. Pomar, V. López
El sector de la producció ramadera a nivell global es veu immers en grans reptes a què ha de donar resposta tant a curt com a mitjà termini. Un d'aquests reptes és l'increment de la demanda mundial de carn i productes d'origen animal, que s'espera augmenti en un 40% en els propers 15 anys. La primera qüestió a què s'enfronta el sector és cóm aconseguir una producció de carn d'alta qualitat, sostenible i alimentàriament segura, que pugui satisfer aquesta demanda. Alhora, l'impacte mediambiental del sector ramader és una qüestió important amb efectes sobre el canvi climàtic i la preservació del medi ambient.
Tots dos problemes ens condueixen a la necessitat de millorar l'eficiència dels sistemes productius, concretament l'eficiència en l'alimentació dels animals, especialment els monogàstrics. Hi ha també una preocupació i interès creixent per la salut animal en relació amb la seguretat alimentària i la salut humana alhora que cal una millora del benestar animal.
Tots aquests problemes i necessitats es poden abordar mitjançant la ramaderia de precisió (PLF – precision livestock farming). La PLF s'ha definit com la gestió i la cura intel·ligents dels animals de manera individualitzada mitjançant el seguiment/control automatitzat continu de la producció/reproducció, la salut i el benestar dels animals, cosa que permet realitzar correccions o intervencions ràpides quan s’observen desviacions de la normalitat. Dit de manera general, la PLF es fonamenta en l'ús intensiu dels avenços a les TIC i la ciència animal i s'orienta a ajudar als ramaders a millorar l'eficiència, la qualitat, el benestar i la salut de la producció ramadera de manera sostenible.
Sistemes Intel·ligents robotitzats
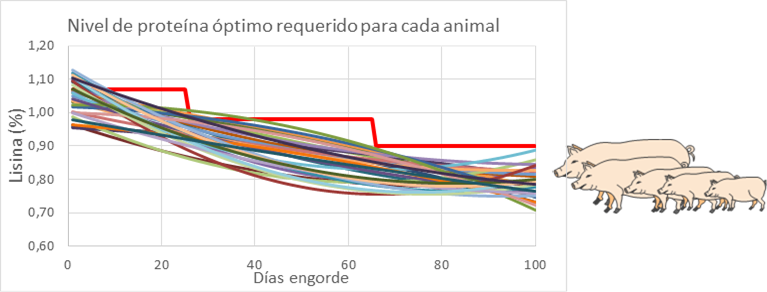
L'alimentació de precisió (AP) constitueix avui un dels grans èxits en aquest àmbit. De manera sintètica la podem definir com una nova tecnologia per a l'alimentació ramadera que fa possible proporcionar a cada animal de la granja, aliment en quantitat adequada i de composició ajustada a les seves necessitats, en un moment determinat. Això es mostra a la següent gràfica en què podem ressaltar dos aspectes claus: 1) cada animal presenta unes necessitats diferents i 2) les necessitats de cada animal (especialment en proteïna) varien de manera important al llarg del temps.
Què necessitem per implementar l'alimentació de precisió en una granja? (1) Poder determinar les necessitats de cada animal en temps real (diàriament), i, (2) Disposar d'una màquina intel·ligent capaç d'alimentar cada animal amb un pinso ajustat a les necessitats.
Equipos robotizados para la alimentación de precisión en granja
Amb aquest repte, el Grup de recerca va iniciar el 2004 una línia d'R+D per a l'impuls de la “porcinocultura de precisió”, iniciant el disseny i desenvolupament d'un sistema robotitzat d'alimentació de precisió i gestió intel·ligent. Aquest projecte, que necessitava molta R+D, es va plantejar conjuntament amb l'Swine Research and Development Centre d'Agriculture and Agri-Food Canada, especialitzat en l'àmbit de la nutrició del porc. Fruit d‘aquest treball de col·laboració s’han aconseguit avenços significatius. Actualment el desenvolupament d'aquests alimentadors està liderat per diferents convenis de col·laboració entre la UdL i l'empresa Exafan SAU, permetent millorar les funcionalitats tant de l'equip robotitzat com del programa de gestió de l’alimentador.
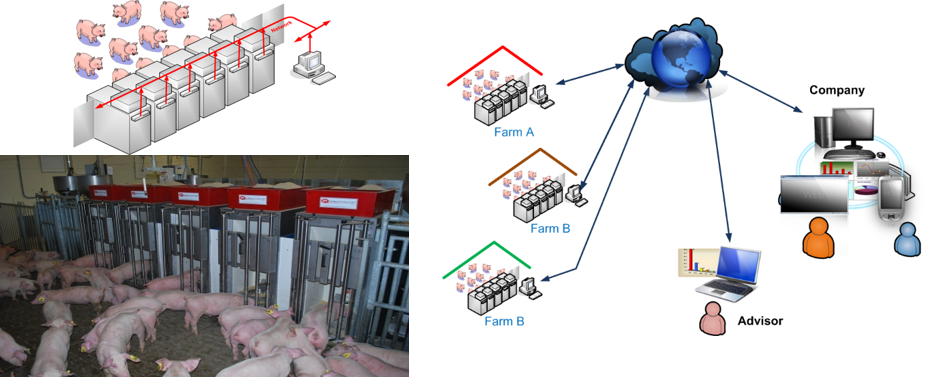
Aquests equips robotitzats fan possible la gestió avançada de les granges en temps real amb accés telemàtic i amb eines de suport a la presa de decisions tècnica, veterinària i empresarial. Entre els resultats obtinguts amb aquesta tecnologia d'alimentació de precisió, els alimentadors IPF-UdL estan demostrant que és possible disminuir el consum de proteïna, reduir el nitrogen als purins (10 – 30%), potenciar el creixement dels animals i millorar l’índex de transformació, de forma simultània. Amb aquest robot es fa factible la mesura i el monitoratge en temps real del creixement i el consum d'aliment de manera automàtica, que són essencials per implementar l'alimentació de precisió i potenciar l'automatització de les tasques de supervisió.
Anàlisi de dades i presa de decisions a AP
Aquesta segona sublínia és complementària a la sublínia anterior, ja que intenta desenvolupar metodologies i eines d'anàlisi davant la informació recollida pel robot alimentador de precisió. La maduresa del mercat del porc tant com blanc i ibèric empeny el sector a competir fortament per preu i qualitat, cosa que obliga les empreses a desenvolupar noves eines i estratègies que permetin millorar el seu procés productiu per mantenir la seva competitivitat.
Algunes d'aquestes eines estan basades en models teòrics amb l'objectiu de calcular les necessitats nutricionals dels animals. Mitjançant la determinació de les necessitats individualitzades de cada animal és possible optimitzar les matèries primeres utilitzades. Aquests models s'han de calibrar correctament en relació amb una població de referència per garantir que l'estimació sigui correcta. Tanmateix, aquests models es veuen desafiats per la dificultat del calibratge, ja que els animals de les poblacions reals poden seguir patrons de creixement diferents dels observats a les poblacions de referència.
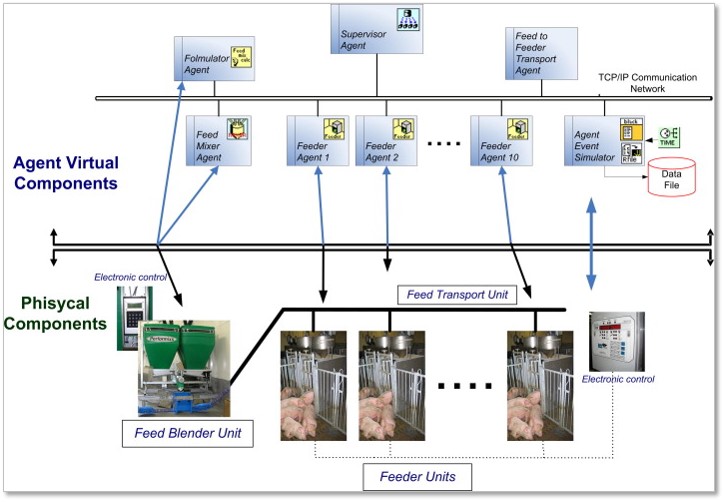
Modelització i simulació de sistemes complexos
L'objectiu amb què es desenvolupa un model és obtenir-ne respostes que en un sistema real trigaria a donar-nos els resultats i, a més seria costós obtenir-los. L'execució d'aquesta simulació consisteix en fer experiments sobre el model en lloc de fer-los sobre el sistema real. Evidentment cal assegurar que el model sigui una representació “vàlida” de la realitat. A més, convé calcular la fiabilitat amb què es presenten els resultats.
El treball realitzat en aquesta sublínia ha consistit en desenvolupar diversos mòduls virtuals, seguint una arquitectura multiagent, els quals representen components reals d'una granja i realitzen funcionalitats concretes. Una de les finalitats es desenvolupar un llenguatge de comunicació senzill – anomenat ACL (Agent Communication Language) – mitjançant el qual els agents involucrats interactuen entre ells d'acord amb uns propòsits concrets.