Tècniques de mapatge per a l’Agricultura de Precisió
Necessitat dels mapes de superfície
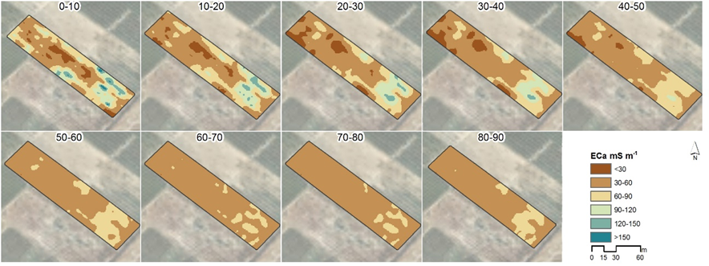
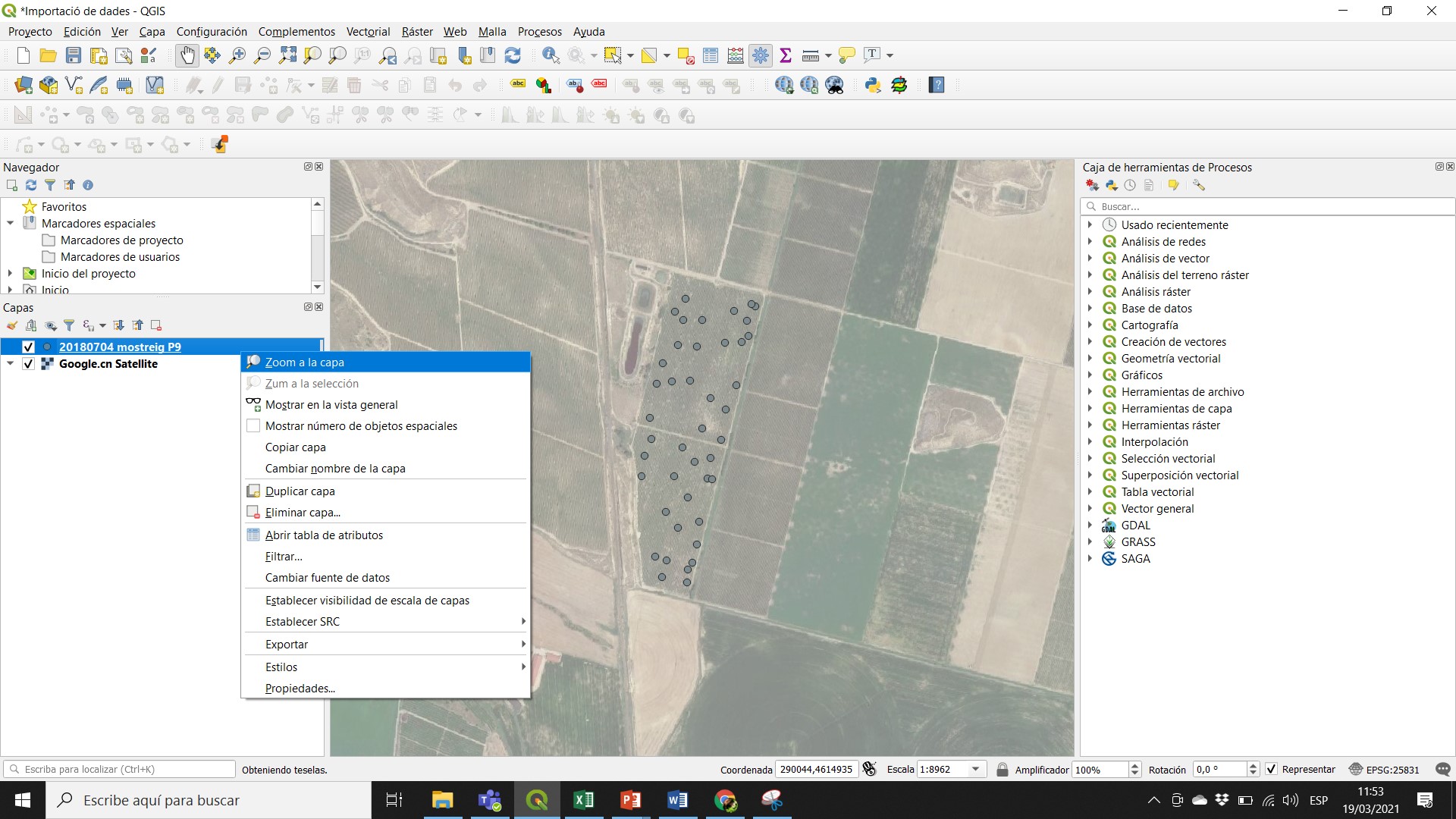
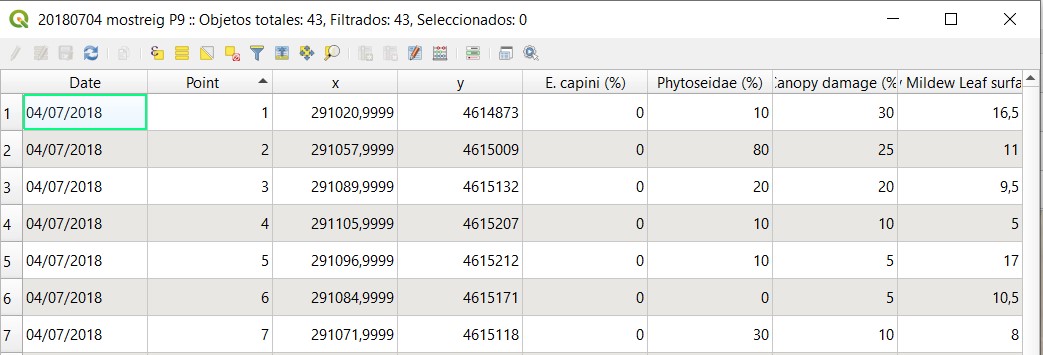
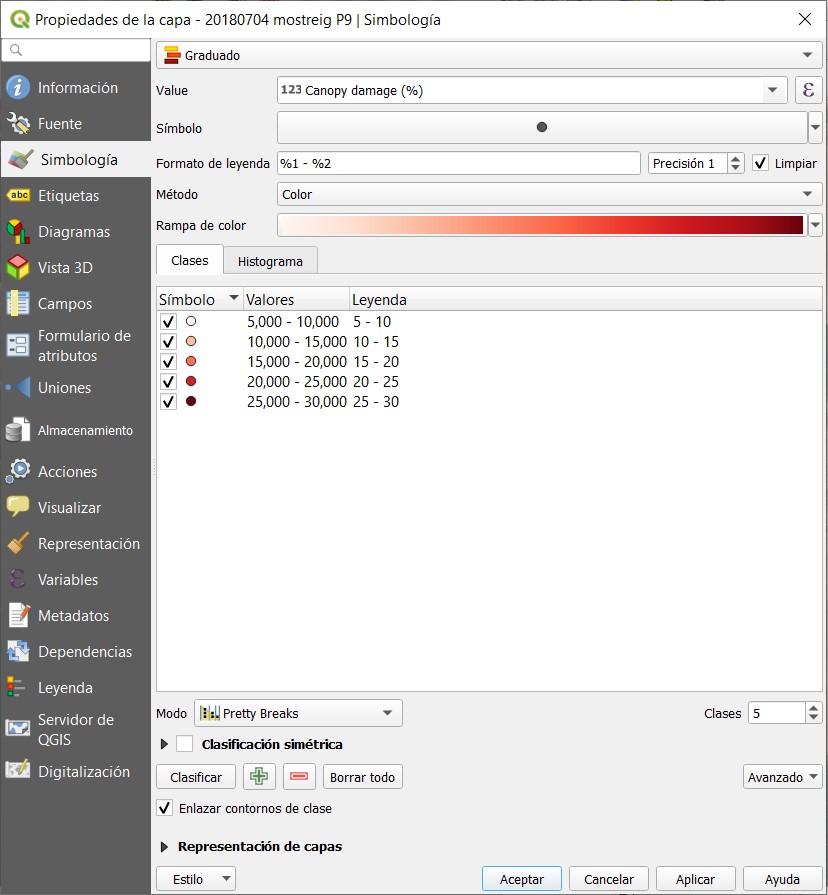
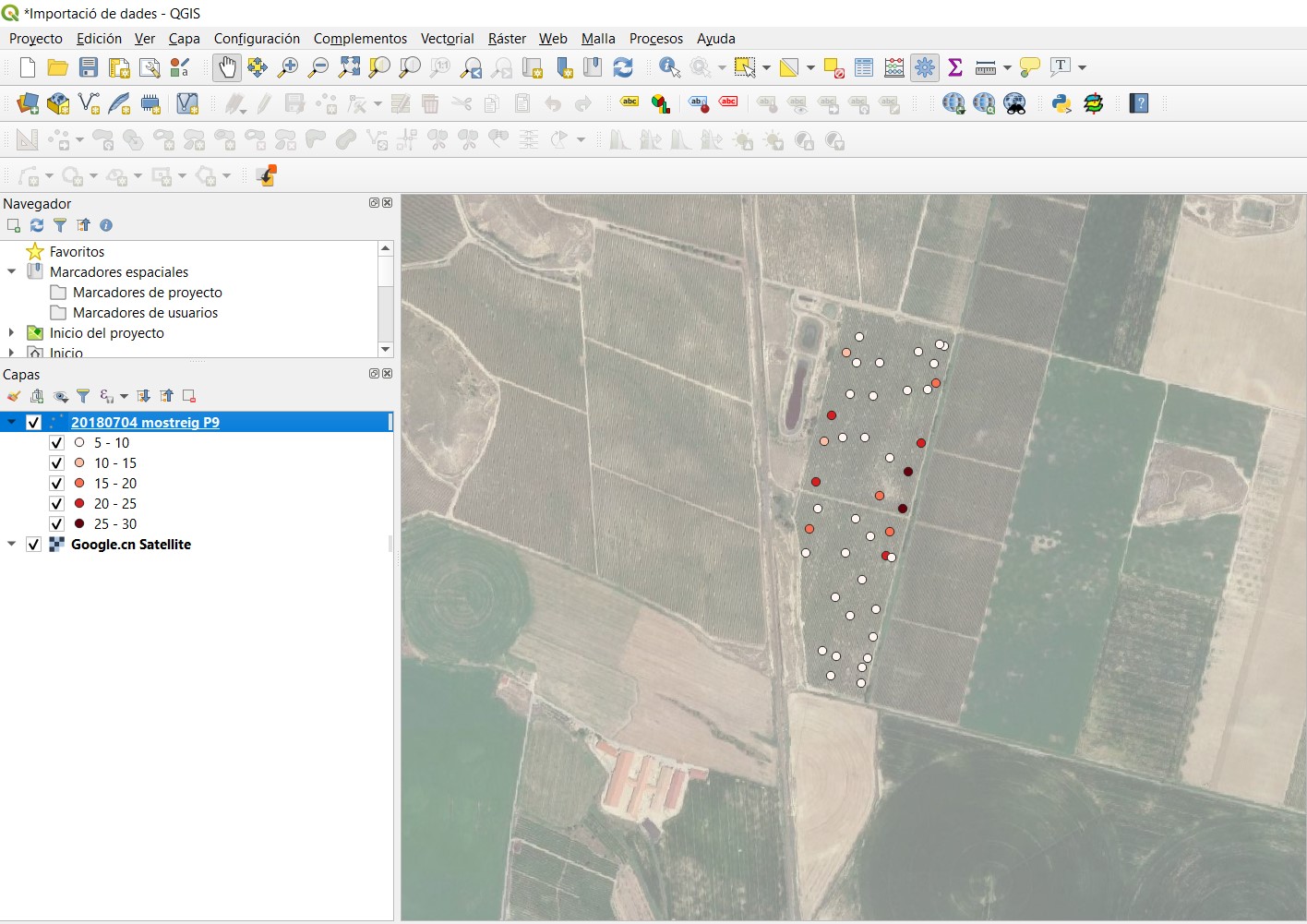
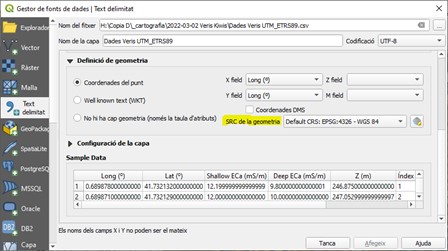
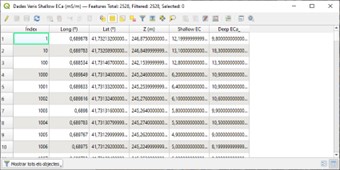
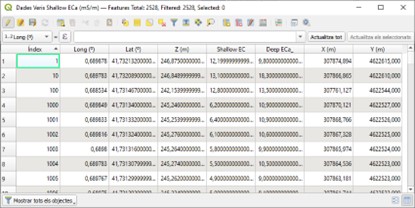
L’adquisició de dades en Agricultura de Precisió (AP) es caracteritza, habitualment, per la mesura d’una variable agronòmica en diferents punts amb informació associada de la seva localització (SSNG). Aquest conjunt de dades puntuals (o dades vectorials puntuals, si utilitzem la terminologia dels Sistemes d’Informació Geogràfica, SIG), es pot visualitzar utilitzant diferents programaris SIG i/o plataformes, obtenint el que se’n diu un mapa de punts o mapa vectorial (dot map). En aquests mapes, cadascun dels punts representats conté informació sobre la variable mesurada (o atribut). Si s’utilitza una llegenda de color adequada, el mapa permet visualitzar d’una manera ràpida i intuïtiva com varia la variable en qüestió segons la localització dins la parcel·la. La Figura 1 mostra, com a exemple, els mapes de dades puntuals de la CEa (conductivitat elèctrica aparent) del sòl a dues profunditats (shallow i deep), un cop representades en un SIG les dades adquirides amb el sensor Veris 3100 en una parcel·la de 14,5 ha situada a Raimat (Lleida).
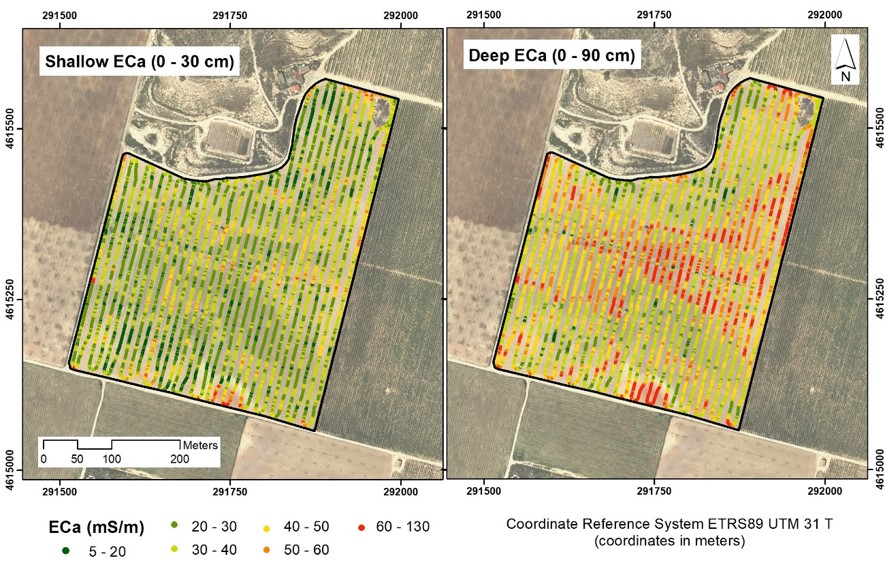
Figura 1. Dades puntuals de CEa adquirides amb el sensor Veris 3100. Esquerra: CEa superficial (0-30 cm). Dreta: CEa profunda (0-90 cm).
Les dades ràster, en canvi, fan referència als valors que assoleix una determinada variable agronòmica en relació a una cel·la o píxel dins una quadrícula o graella de píxels (grid) que cobreix la zona (o parcel·la) d’interès (Fig. 2). En aquest cas, la localització dels valors de la variable es basa en l’ordenació dels píxels segons una disposició de files i columnes. Aquest tipus de dades són les proporcionades, per exemple, per les imatges satel·litals o les imatges aèries adquirides des d’avioneta o dron, cada cop més utilitzades en AP. Comparat amb les dades vectorials, l’ús de dades ràster presenta l’avantatge de proporcionar la informació espacial amb continuïtat, la qual cosa és aplicable a moltes de les característiques del sòl i/o del cultiu que se solen mesurar en AP. A més, estant referida la informació espacial sobre una mateixa quadrícula de píxels, els agricultors i/o assessors tècnics poden ara interpretar la informació adquirida d’una manera més raonada, al fer-se factible la comparació entre mapes de diferents campanyes o l’anàlisi conjunta de mapes de diferents variables agronòmiques. En definitiva, i amb l’objectiu d’extreure informació útil i més fàcilment interpretable, és una bona opció mapejar la informació proporcionada pels diferents sensors emprats en AP en un format de mapa de superfície o mapa amb cobertura ràster. La Figura 3 mostra els mapes de superfície obtinguts a partir de les dades vectorials mostrades en la Figura 1. El pas d’un mapa amb dades puntuals a un mapa de superfície requereix aplicar un procés d’interpolació espacial.
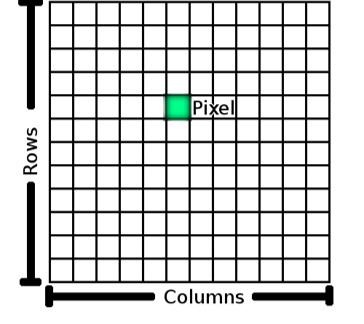
Figura 2. Conjunt de píxels (dades ràster) disposats ordenadament en files i columnes. Cada píxel té la mateixa mida (àrea), sent el valor de píxel el valor que assoleix la variable agronòmica per a aquesta àrea (documentación de QGIS 2.18).
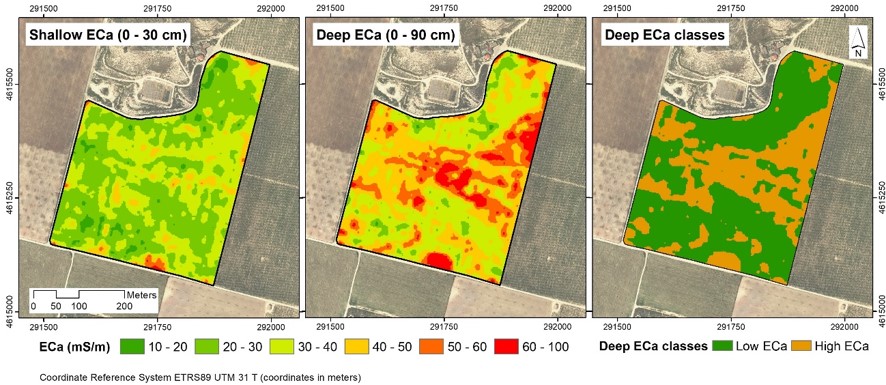
Figura 3. Esquerra: Mapa ràster de la CEa superficial (0-30 cm). Centre: Mapa ràster de la CEa profunda (0-90 cm). Dreta: Mapa que mostra dues classes de CEa profunda (baixa i alta conductivitat).
Mapar una variable agronòmica és una qüestió d’interpolació espacial
Tal i com s’ha comentat, l’obtenció d’un mapa de superfície (amb cobertura ràster) a partir d’un conjunt de dades puntuals requereix aplicar un procediment d’interpolació espacial. Existeixen diferents mètodes d’interpolació. Independentment que se n’utilitzi un o altre, l’obtenció de mapes de superfície en AP s’aplica normalment a dades quantitatives que, o bé han estat adquirides amb procediments manuals de baixa intensitat (Fig. 4) o, com succeeix la majoria de les vegades, han estat registrades utilitzant sensors en continu (on-the-go) que acaben proporcionant un gran nombre de dades a nivell de parcel·la (Fig. 5). El que varia entre ambdós casos és el suport de la informació disponible, constituint les dades puntuals del monitor de collita (Fig. 5) un suport espacial de major resolució (amb possibilitat, per tant, d’observar un major contrast en la variació local de la variable mapejada).

Figura 4. Cas d’una variable registrada manualment segons un esquema de mostreig sistemàtic: nombre de raïms per cep. Centre: Dades puntuals. Dreta: Mapa de superfície després d’aplicar un mètode d’interpolació espacial.
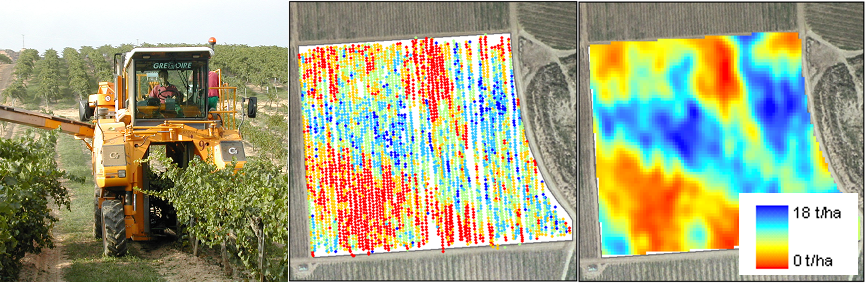
Figura 5. Cas d’una variable registrada en continu (on-the-go): collita de raïm (t/ha). Centre: Dades puntuals subministrades pel monitor de collita. Dreta: Mapa de superfície després d’aplicar un mètode d’interpolació espacial.
Mètodes d’interpolació
Els mètodes d’interpolació es classifiquen, pel que fa al model de predicció espacial emprat, en dues categories principals: deterministes i probabilístics. Tot i que se'n poden citar uns quants, podem destacar els mètodes de mitjana mòbil i invers a la distància, dins el primer grup, i la interpolació geoestadística, quan s’opta, dins el segon grup, per l’ús d’un model de predicció probabilístic linial.
Però, abans de descriure els diferents mètodes, cal establir i entendre la terminologia comuna que hi ha darrere dels mètodes d’interpolació espacial. La Figura 6 mostra, per una banda, les dades puntuals obtingudes d’una determinada variable agronòmica ( ) en diferents punts georeferenciats ( ) i, per una altra, els punts que conformen la malla (o quadrícula) d’interpolació, és a dir, els punts (de predicció) de coordenades conegudes centrats en els píxels als quals se’ls assignarà un valor representatiu de la variable. La representació dels valors de predicció (valors de píxel) sobre l’àrea a mapejar conforma el mapa final de superfície buscat. En la mateixa figura es ressalta, dins la quadrícula, el punt de predicció 0 amb coordenades ( ), encerclat de l’anomenat radi de cerca. Aquest radi serveix per definir prèviament els punts originals (punts veïns) que intervindran en el procediment d’interpolació espacial del punt 0 (altres vegades, en lloc d’un radi de cerca, s’utilitza un nombre mínim-màxim de punts veïns al punt de predicció). Aquesta característica és pròpia dels mètodes d’estimació local, és a dir, dels mètodes que busquen estimar el valor d’una variable agronòmica en una localització concreta (en aquest cas, en el punt de predicció representatiu de la cel·la o píxel).
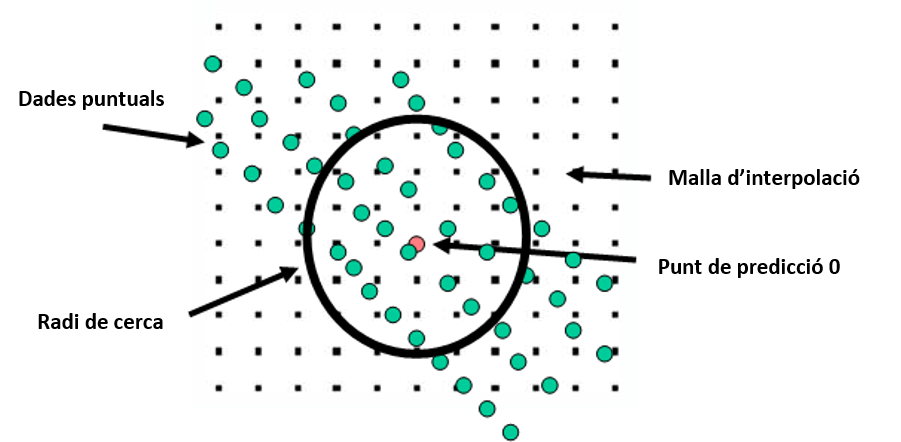
Figura 6. Esquema dels elements que intervenen en un procediment d’interpolació espacial per a l’estimació local d’una variable agronòmica (Whelan & Taylor, 2013).
La diferència entre mètodes d’interpolació rau, bàsicament, en el criteri utilitzat a l’hora d’assignar els valors de píxel tenint en compte les dades puntuals adquirides (valors i disposició espacial dels punts veïns dins el radi de cerca). Concretament, el valor estimat de la variable en el punt de predicció s’obté en base a un model linial de la forma,
 (1)
(1)
és a dir, aplicant una mitjana ponderada als valors de la variable en els punts veïns (dins el radi de cerca) al punt de predicció. Si s’opta pel mètode de ‘mitjana mòbil’, el valor resulta simplement d’aplicar la mitjana aritmètica dels punts que han estat encerclats pel radi de cerca. Per tant, aquest mètode valora les dades puntuals amb el mateix pes (estiguin a prop o lluny del punt de predicció), resultant normalment uns mapes força suavitzats. Si s’opta pel mètode de la ‘ponderació inversa a la distància’, els valors de la variable es ponderen normalment de forma inversa al quadrat de la distància que els separa del punt de predicció; s’atribueix, per tant, major pes als punts veïns que estan a prop del punt de predicció, disminuint la seva influència de forma dràstica a mesura que s’allunyen d’aquest punt.
La interpolació geoestadística
Enfront dels mètodes anteriors, la interpolació geoestadística assigna els pesos a les dades puntuals en base a la modelització espacial prèvia de totes les dades adquirides (és a dir, considerant totes les dades dins i fora del radi de cerca). Un cop obtingut aquest model (anomenat variograma), el procediment d’interpolació assigna finalment els pesos als punts veïns (punts dins el radi de cerca) en base a la resolució d’un sistema d’equacions (sistema kriging) que utilitza la informació prèvia subministrada pel variograma. En definitiva, la ponderació està basada en un criteri més objectiu en tant que considera el patró de variació espacial de la variable a l’hora de ponderar unes localitzacions més que unes altres. Finalment, a diferència dels mètodes deterministes, l’aplicació del kriging fa possible també que es pugui obtenir una estimació de l’error comès en la interpolació. Aquesta possibilitat es clau per tal de validar la fiabilitat dels mapes obtinguts.
Pel que fa al suport de la predicció, pot optar-se per una interpolació puntual (punctual kriging), o per una interpolació en blocs (block kriging). En el primer cas (Fig. 7), el valor estimat de la variable en el punt de predicció es correspon amb el valor que presumiblement assoleix la variable en aquest punt geogràfic, fent extensible aquest valor a l’àrea ocupada per la cel·la o píxel corresponent. En canvi, si s’opta per una interpolació en blocs (Fig. 7), el valor finalment assignat al punt de predicció (i, per tant, valor assignat al píxel corresponent) ve a representar el valor promig que pren la variable per a una àrea (bloc) de major superfície centrada en el píxel. Com es esperable, el mapejat en base a aquesta segona opció proporciona mapes menys contrastats i amb un cert grau de suavització.
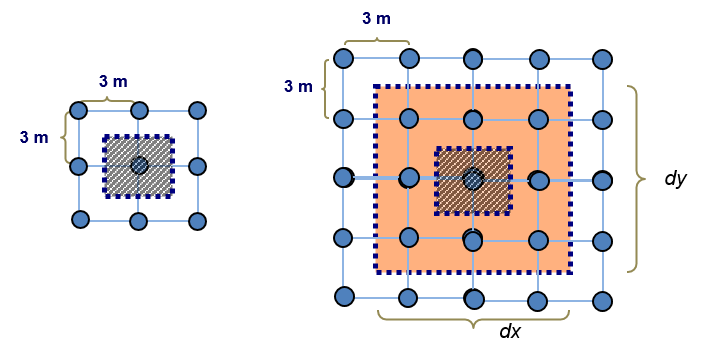
Figura 7. Malla d’interpolació amb píxels de 3 m. Esquerra: Kriging puntual (el valor interpolat és el que correspon al punt representatiu del píxel). Dreta: Kriging en blocs de mida dx·dy m (el valor interpolat i que s’assigna al píxel és el que correspon a un bloc de major mida centrat en el píxel).
A manera comparativa, la Figura 8 mostra els mapes de superfície de conductivitat elèctrica aparent (CEa, 0-90 cm), utilitzant interpolació puntual i interpolació en blocs, respectivament.
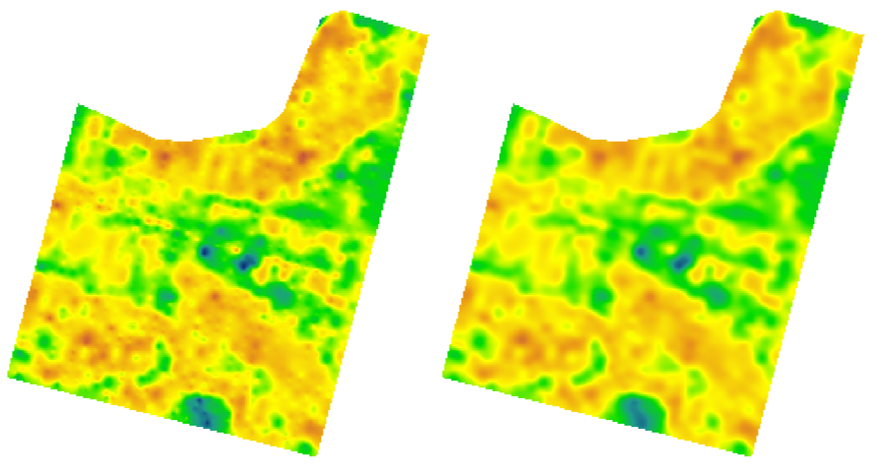
Figura 8. Mapes de CEa (0-90 cm) utilitzant una malla d’interpolació de 2 m en ambdós casos. Esquerra: Mapa interpolat en base a un kriging puntual. Dreta: Mapa interpolat en base a un kriging en blocs de 10 m. Aquest darrer mapa mostra una aparença més suavitzada per l’efecte de la interpolació en blocs.
Programaris i validació de mapes
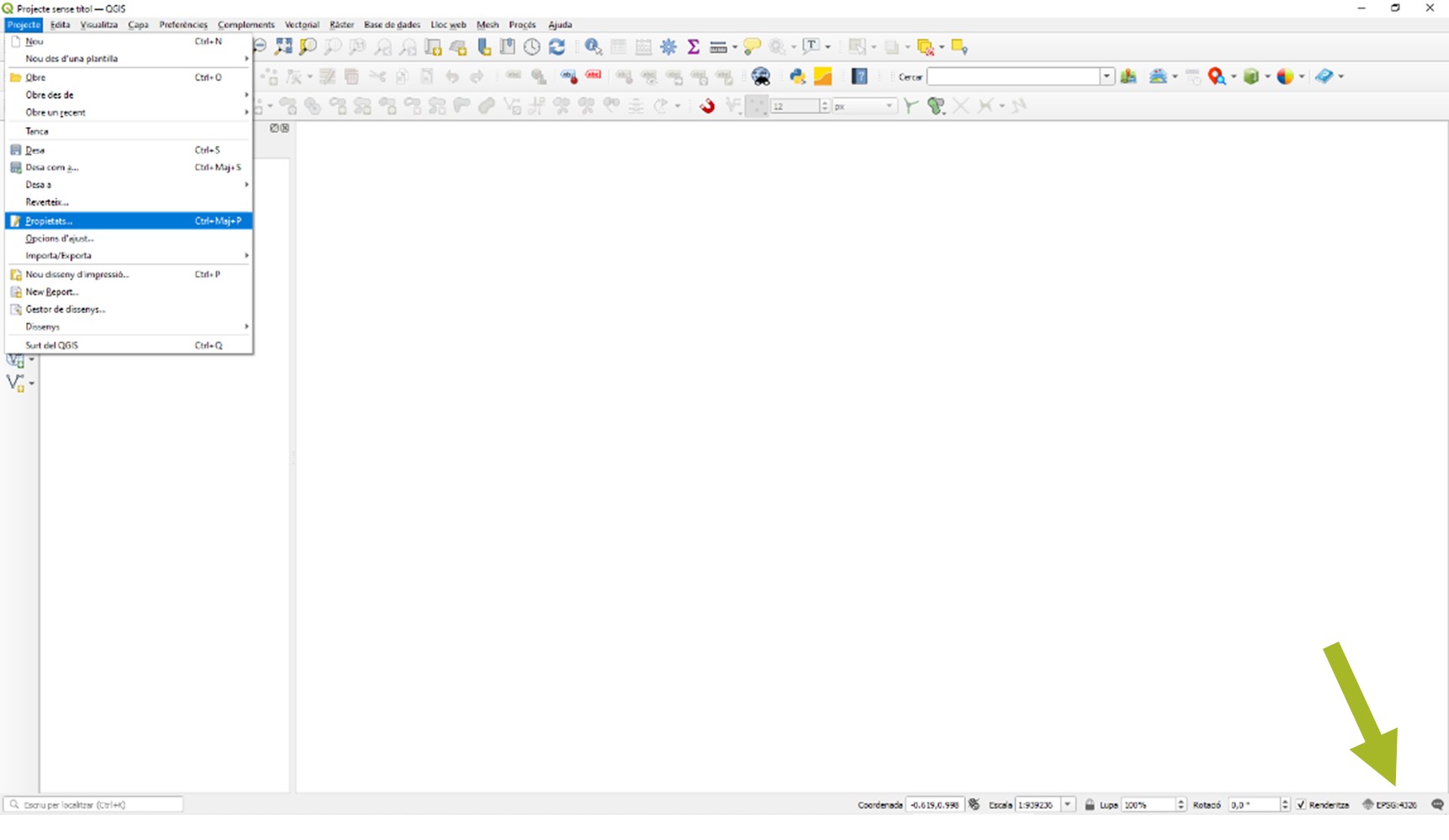
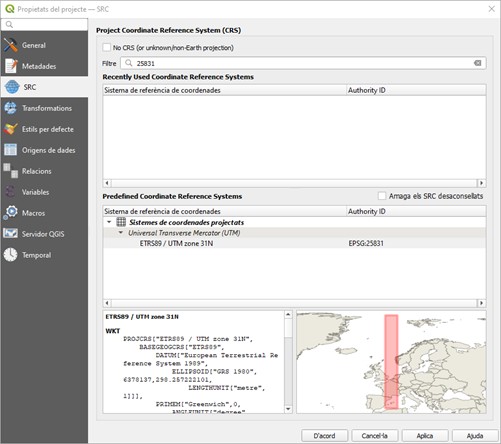
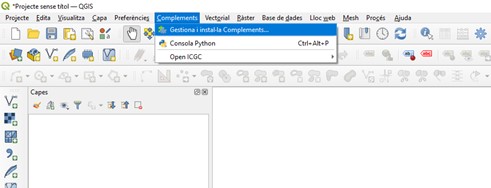
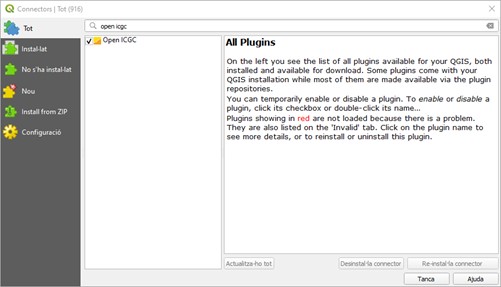
Existeixen diferents programaris per al mapejat mitjançant interpolació geoestadística. La nostra recomanació és utilitzar el programari de lliure accés VESPER (Minasny et al., 2005). A diferència d’altres programaris, VESPER permet obtenir mapes en base a la utilització de variogrames locals, és a dir, utilitzant un variograma específic per a cada punt de predicció (píxel) que conforma el mapa. Aquesta utilitat és força convenient quan es disposa d’una gran quantitat de dades, procedents, normalment, de parcel·les de certa dimensió (com és el cas de les dades de collita o les dades de CEa que se solen utilitzar en AP). Existeix, fins-i-tot, un plugin instal·lable en el programari QGIS (PAT – Precision Agriculture Tools) que integra VESPER per a la interpolació geoestadística. Altres opcions de programaris disponibles en codi obert o sense necessitat de llicència són: SAGA (System for Automated Geoscientific Analyzes) i R.
Pel que fa a la validació dels mapes obtinguts, s’ha de tenir en compte que la interpolació geoestadística permet obtenir dos mapes: el mapa de prediccions (o mapa de la variable agronòmica), i el mapa d’error (o mapa que proporciona per a cada píxel la variància estimada de predicció, l’arrel quadrada de la qual ve a ser una mesura de l’error esperable de la predicció).
Al disposar d’aquesta informació, una forma de validar el mapa interpolat és calculant la mitjana dels valors de píxel del mapa d’error (o variància de predicció global). Si aquest valor s’apropa a la variància de les dades de partida (variància global), llavors el mapa és 100% imprecís; si la variància de predicció global tendeix a 0, es conclou que el mapa és 100% precís.
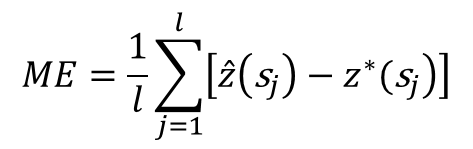
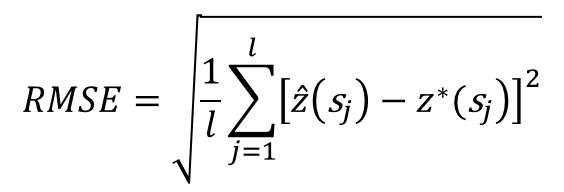
De tota manera, la qualitat d’un mapa només es pot comprovar quan es disposa de punts de validació, és a dir, punts mostrejats diferents del conjunt de dades puntuals utilitzades per fer les prediccions. Anomenant els valors estimats en el mapa, , i els valors actuals o reals en els punts de validació, , s’acostumen a utilitzar els següents indicadors:
- Error mig de predicció: (2)
- Arrel de l’error quadràtic mig de predicció: (3)
A manera de recordatori
Etapes per a la realització d’un mapa
(1) Dissenyar un pla adequat de mostreig (adquisició de dades) dins l’àrea d’estudi (parcel·la o finca).
(2) Adquirir les dades i prendre nota de la seva localització geogràfica.
(3) Obtenir el variograma mitjançant la modelització espacial de les dades mostrejades (anàlisi variogràfica).
(4) Implementar el model espacial en el sistema d’interpolació (kriging).
(5) Validar el mapa.
(6) Obtenir el mapa final de la variable mostrejada.
Requisits de les dades
Encara que es facin servir tècniques geoestadístiques potents, només s'obtindran mapes de qualitat si les dades puntuals adquirides compleixen una sèrie de requisits:
- Les dades han de ser suficients. El conjunt de dades ha de ser suficientment gran per tal de permetre la realització de tests de validació estadística. Normalment, es recomana disposar de ≥50 punts per fer una estimació i modelització fiables del variograma.
- Les dades han de ser representatives. El conjunt de dades ha de representar l’àrea d’interès, tant pel que fa a la cobertura geogràfica com pel que fa a la diversitat de característiques espacials.
- Les dades han de ser independents. Es recomana que les dades s’adquireixin mitjançant un mostreig no preferencial, evitant donar especial rellevància a ubicacions que són més fàcils de visitar, o que puguin estar influenciades per qualsevol altre tipus de biaix humà. Preferiblement, els punts de localització s’han de seleccionar mitjançant dissenys com ara el mostreig aleatori simple, el mostreig regular (o sistemàtic), o el mostreig aleatori estratificat. La presa de dades en continu (on-the-go) és una altra modalitat a tenir en compte.
- Les dades han d’estar georeferenciades. La geolocalització de les mesures ha de ser precisa. En el límit, l’error de localització mai hauria de superar l’interval espacial de mostreig.
Referències
Arnaud M, & Emery X. 2000. Estimation et interpolation spatiale. Paris: Hermes Science Europe.
Hengl T. 2009. A practical guide to geostatistical mapping. http://spatial-analyst.net/book/system/files/Hengl_2009_GEOSTATe2c1w.pdf
Minasny B, McBratney AB, & Whelan BM. 2005. VESPER version 1.62. Australian Centre for Precision Agriculture, McMillan Building A05, The University of Sydney, NSW 2006. https://precision-agriculture.sydney.edu.au/resources/software/download-vesper/
QGIS 2.18. https://docs.qgis.org/2.18/es/docs/gentle_gis_introduction/raster_data.html
Webster R, & Oliver MA. 2001. Geostatistics for environmental scientists. Statistics in Practice. Chichester: John Wiley & Sons.
Whelan B, & Taylor J. 2013. Precision agriculture for grain production systems. Collingwood: CSIRO Publishing.


Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Generació de núvols de punts 3D i extracció d’informació
Una vegada adquirides les dades amb un escàner làser o bé amb càmeres RGB-D o simplement amb càmeres RGB, cal generar els núvols de punts que recrearan l’escena escanejada en 3D. Els processos utilitzats dependran de la tecnologia aplicada i dels sensors utilitzats.
Generació dels núvols de punts
En el cas d’utilitzar escàners làser terrestres, ens podem trobar amb sistemes mòbils o portàtils o bé amb sistemes estacionaris. En el segon cas, quan s’utilitzen sistemes estacionaris, aquests acostumen a ser sensors 3D que cal anar estacionant en llocs diferents per tal d’obtenir dades de tota l’escena sense ombres ni zones amagades. El que s’acostuma a fer en aquests casos és distribuir diverses dianes per tota l’escena que es faran servir posteriorment en un programa informàtica de visualització i edició de per a alinea i situar els diferents núvols de punts de cada estacionament en un sol espai tridimensional de coordenades relatives. Si, a més, les dianes s’han georeferenciat amb coordenades absolutes, els punts del núvol final de tota l’escena també tindran coordenades absolutes. En cas d’utilitzar sistemes mòbils o portàtils, ja siguin terrestres (Figura 1) o aeris, el primer que cal fer es determinar la trajectòria del sensor LiDAR per tal de saber el més exactament possible des d’on s’han realitzat les mesures. Aquesta trajectòria es pot determinar mitjançant tècniques analítics d’SLAM (Simultaneous Location And Mapping) o bé fent servir receptors SSNG o bé fent servir sensors inercials. Tanmateix, per tal d’aconseguir uns bons resultats, el millor és integrar totes tres opcions. Això es fa amb programes específics normalment facilitats pel mateix fabricant del sistema d’escaneig.

Figura 1. Escàner terrestre mòbil Viametris bMS3D del GRAP.
Quan es treballa amb càmeres RGB-D encara no hi ha una metodologia específica desenvolupada a nivell comercial per tal de generar núvols 3D de les escenes escanejades directament. Tanmateix, els algorismes a desenvolupar s’hauran de basar en les mateixes tècniques d’SLAM, georeferenciació i mesures inercials per a determinar la trajectòria i orientació dels sensors per tal de posicionar els núvols de punts obtinguts en cada captura.
Quan es fan servir càmeres RGB convencionals juntament amb tècniques fotogramètriques, una vegada fetes les captures ja sigui des de l’aire o des de terra es faran servir programes informàtics comercials específics per a generar els núvols de punts de les escenes fotografiades. Per a aconseguir núvols de qualitat és imprescindible que les imatges tinguin una bona superposició tant longitudinal com lateral.
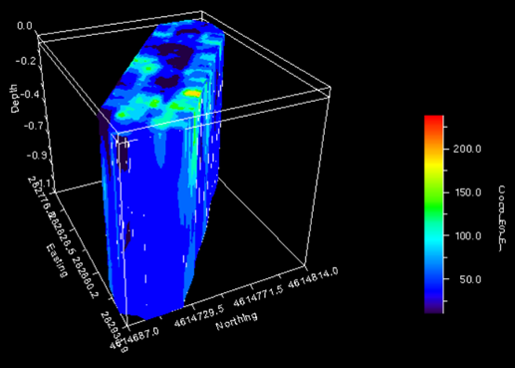
En tots els casos, el resultat aconseguit és un núvol de punts 3D amb més o menys resolució i exactitud com, per exemple els de la Figura 2 i Figura 3.
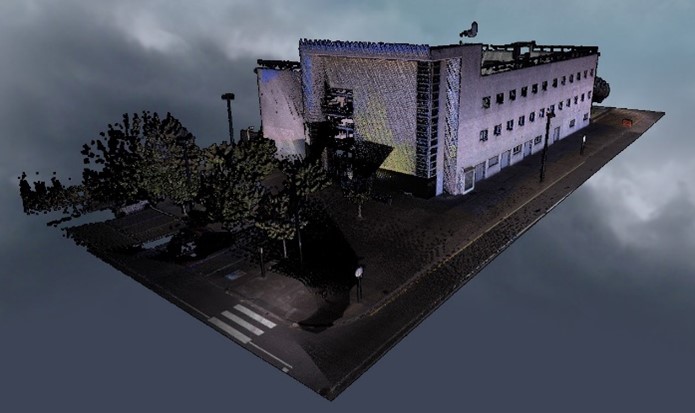
Figura 2. Núvol de punts 3D de l’Edifici 4 del Campus Agroalimentari, Forestal i Veterinari de la Universitat de Lleida generat a partir de l’escàner làser terrestres mòbil Viametris bMS3D del GRAP.

Figura 3. Núvol de punts 3D d’un tram de fila de pomers obtingut a partir d’imatges RGB i tècniques fotogramètriques.
Extracció d’informació dels núvols de punts
Tanmateix, aquests núvols de punts no són d’utilitat directa per als agricultors i agricultores o per al seu personal tècnic. El que cal és extreure el màxim d’informació possible dels núvols per a poder-la fer servir en la presa de decisions de maneig agronòmic.
Actualment ja hi ha molt programes informàtics dedicats a visualitzar, editar i processar núvols de punts. Malauradament, cap d’ells està pensat per a aplicacions agrícoles. Hi ha solucions comercials en topografia, en diverses indústries i, fins i tot, en l’àmbit forestal però, de moment, no hi ha programes que processin núvols de punts agrícoles.
Al Grup de Recerca en AgròTICa i Agricultura de Precisió, una de les seves línies de recerca és generar i aplicar dades 3D dins del marc de l’Agricultura de Precisió. En aquesta línia de recerca s’han desenvolupat processos per a analitzar els núvols de punts consistents en separar els punts sobre la superfície del sòl dels punts sobre la vegetació i en extreure dades útils del dosser foliar. Amb els punts sobre el terreny es poden generar models digitals del terreny amb moltíssima resolució. Amb els punts sobre la vegetació es poden obtenir dades sobre la seva alçada, la seva amplada, el seu volum, la seva porositat i la seva superfície foliar. A la Figura 4 es mostra un esquema sobre com s’extreuen les dades del dosser foliar. El procés consisteix en analitzar els punts dels núvols 3D que estan sobre les files de vegetació i agrupar-los en prismes de 10 cm al llarg de les files. Aquests prismes s’analitzen individualment i se n’obté el punt més alt, corresponent a l’alçada del dosser foliar en aquell punt, les amplades del dosser a diferents alçades, la secció transversal ocupada i la seva porositat.
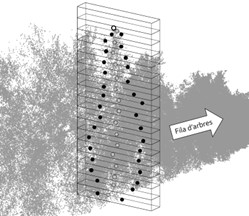
Figura 4. Núvol de punts 3D d’un tram de fila d’olivers superintensius i obtenció de l’alçada i de les amplades a diferents alçades. Font: Precision Agriculture 18(1), 111-132. DOI: 10.1007/s11119-016-9474-5.
Donat que els punts tenen associades les coordenades absolutes de la seva posició, totes les mesures derivades estan perfectament georeferenciades. Una vegada obtinguts els paràmetres del dosser foliar, se’ls assignen les coordenades del lloc d’on s’han obtingut i, després de fer una interpolació espacial anomenada krigatge, es poden elaborar els mapes de la seva distribució espacial (Figura 4). Aquests mapes ja són més útils per a l’agricultor/a o el seu personal tècnic, ja que poden veure ràpidament si el seu cultiu es desenvolupa uniformement en tota la plantació o si, per contra, hi ha variabilitat.
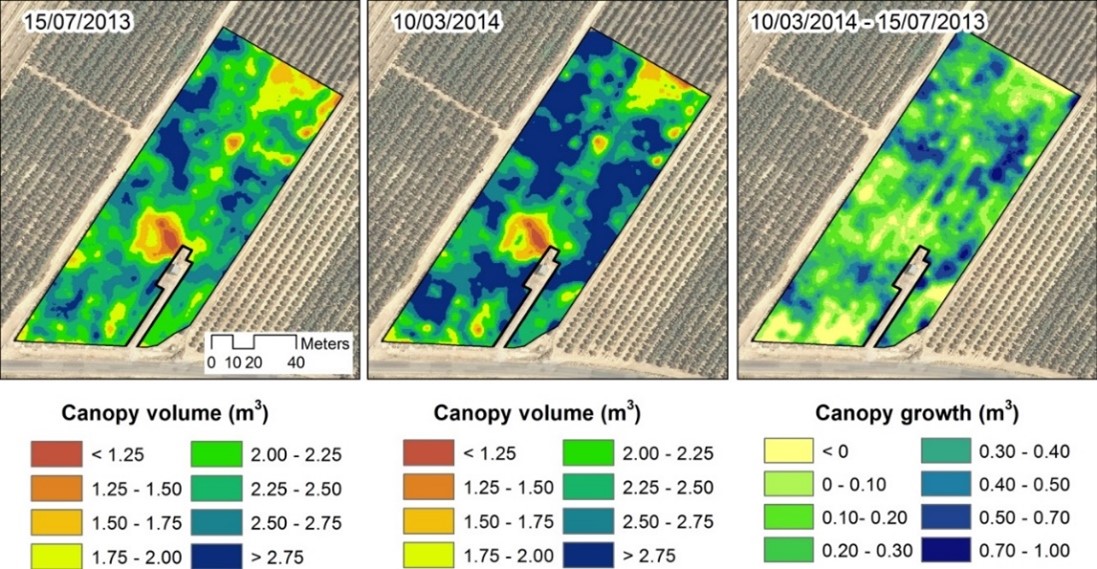
Figura 5. Mapes de volum de vegetació en una plantació d’olivers superintentius en dos dates diferents (esquerra i centre) i mapa de creixement (dreta). Font: Precision Agriculture 18(1), 111-132. DOI: 10.1007/s11119-016-9474-5.
Actualment, al GRAP continuem treballant per a finalitzar el desenvolupament d’aquests algorismes per a poder-los transferir al sector tan aviat com sigui possible.
Referències
Escolà A, Martínez-Casasnovas JA, Rufat J, Arnó J, Arbonés A, Sebé F, Pascual M, Gregorio E, Rosell-Polo. 2017. Mobile terrestrial laser scanner applications in precision fruticulture/horticulture and tools to extract information from canopy point clouds. Precision Agriculture 18(1), 111-132. DOI: 10.1007/s11119-016-9474-5.
Més informació a:
Publicacions científiques del Grup de Recerca en AgròTICa i Agricultura de Precisió: www.grap.udl.cat/ca/publications/Publicacions-cientifiques
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Tècniques de classificació de dades o zonificació