Datasets
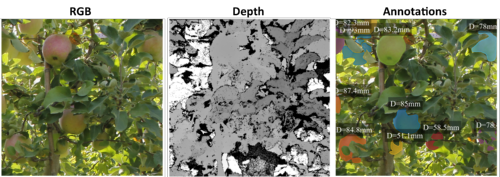
PApple_RGB-D-Size dataset
El conjunt de dades “PApple_RGB-D-Size dataset” está format per 3925 imátges RGB-D de pomeres Fuji amb les corresponents anotacions de segmentació i diàmetre de les pomes. Podeu trobar més informació d’aquest conjunt de dades aquí.
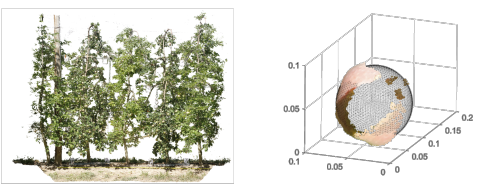
PFuji-Size datset
El conjunt de dades “PFuji-Size datset” conté models 3D de 615 pomes Fuji escanejades en una plantació comercial i 25 pomes escanejades en condicions de laboratori. El conjunt de dades inclou les imatges originals, els nuvols de punts 3D obtinguts amb tècniques de fotogrametria i les etiquetes (ground truth) de la posició 3D i diàmetre dels fruits. Podeu trobar més informació d’aquest conjunt de dades aquí.
AgLiMatch dataset
El conjunt de dades “Agricultural LiDAR data to evaluate scan matching techniques (AgLiMatch)” està format per un conjunt de captures LiDAR i les corresponents trajectòries GNSS-RTK adquirides mitjançant una plataforma automotriu en una plantació de pomeres Fuji. Podeu trobar més informació d’aquest conjunt de dades aquí.

KEvOr dataset
El conjunt de dades “Kinect Evaluation in Orchard conditions dataset (KEvOr)” està format per un conjunt d’imatges RGB-D realitzades amb el sensor Microsoft Kinect v2 amb l’objectiu d’avaluar aquest sensor en les diferents condicions de il·luminació de les plantacions fructícoles i mesurant des de diferents distancies. Podeu trobar més informació d’aquest conjunt de dades aquí.

Fuji-SfM dataset
El conjunt de dades Fuji-SfM dataset conté 582 imatges de 11 pomeres Fuji per tal de generar el model 3D dels arbres escanejats mitjançant tècniques de structure-from-motion. A més, el conjunt de dades inclou la posició 3D (en coordenades globals) dels 1455 fruits que contenen els 11 arbres escanejats, així com 288 imatges addicionals etiquetades per entrenar la xarxa neuronal Mask-RCNN. Podeu trobar més informació d’aquest conjunt de dades aquí.

LFuji-air dataset
El conjunt de dades LFuji-air dataset conté models 3D de 11 pomeres Fuji escanejades amb LiDAR des de diferents posicions i aplicant diferents condicions d’aire, permetent un anàlisis de la utilitat de l’aplicació forçada d’aire i de l’escaneig des de diferents posicions per detecció de fruits, predicció de collita i caracterització geomètrica de la vegetació. Podeu trobar més informació d’aquest conjunt de dades aquí.

KFuji RGB-DS database
El conjunt de dades KFuji RGB-DS dataset està format per 967 imatges multi-modals de pomers Fuji capturades amb el sensor Microsoft Kinect v2. Cada imatge conté informació de tres modalitats diferents: color (RGB), profunditat (D) i intensitat IR corregida en distància (S). Podeu trobar més informació d’aquest conjunt de dades aquí.
