1.5 Aplicació de fitosanitaris de precisió
Participants: J. Llorens, A. Escolà, J. Arnó, C. Román, E. Gregorio, J.R. Rosell-Polo, F. Solanelles, F. Camp.
Es pot definir l’aplicació de fitosanitaris de precisió com un maneig que, utilitzant els avenços tecnològics, optimitzi l'ús dels insums (per exemple, els productes fitosanitaris, PF) maximitzant el rendiment, la qualitat de la producció i minimitzant l'impacte i el risc mediambiental. L'optimització de l'ús de PF a l’Agricultura de Precisió vindrà definida per l'aplicació de la dosi mínima efectiva (kg.ha-1) adaptada a les diferents característiques de l'objectiu que cal tractar dins de cada parcel·la. Els avenços en maquinaria, programari, sistemes de posicionament (GNSS, Global Navigation Satellite Systems), sensors de caracterització de la vegetació (propers i remots) i tecnologies d'aplicació variable, ofereixen la possibilitat de portar l'adaptació de l'aplicació a la pràctica. En aquest sentit, el GRAP va iniciar els seus treballs en l'àmbit de l'aplicació de productes fitosanitaris fa més de 20 anys, molt abans de la creació oficial del grup de recerca. Una de les primeres línies de recerca va ser l'aplicació variable de productes fitosanitaris tot desenvolupant un prototipus de polvoritzador hidropneumàtic capaç de modificar el cabal de caldo polvoritzat de manera proporcional a la mida dels arbres objectiu del tractament (Escolà et al., 2013; Solanelles et al., 2002). Tots els treballs en aquesta línia d’aplicació de fitosanitaris de precisió tenen com a objectiu aconseguir una deposició de producte fitosanitari uniforme sobre la superfície de les fulles independentment de la mida del cultiu. I a la vegada reduir la quantitat de producte dipositat al sòl o la que es perd per efecte de la deriva, optimitzant d’aquesta forma les aplicacions de fitosanitaris i assegurant la protecció del medi ambient.
Anàlisi de la qualitat i l’eficiència dels tractaments
En el procés de millora de les aplicacions de fitosanitaris és important disposar d’eines per a l’anàlisi de la qualitat i l’eficiència dels tractaments, aquestes eines han de permetre avaluar la quantitat de producte que es reté en l’objectiu de tractament (cultiu, fulles, fruits, tronc, sòl,...) i determinar aquella quantitat que no arriba el seu objectiu i es perd per deriva o per deposició en zones no desitjades.
És per això que el grup de recerca GRAP té experiència en realitzar assaigs seguint protocols estandarditzats ISO (International Organitzation for Standardization, https://www.iso.org) per a la quantificació de la deposició i deriva (Román et al., 2022, 2021, 2020, 2019; Torrent et al., 2020, 2017). Aquests protocols estan recollits en els següents documents:
- ISO 5682-1:2017: Equipment for crop protection – Spraying equipment – Part 1: Test methods for sprayer nozzles.
- ISO 5682-2:2017 Equipment for crop protection - Spraying equipment - Part 2: Test methods for hydraulic sprayers.
- ISO 5682-3:2017 Equipment for crop protection - Spraying equipment - Part 3: Test methods for volume/hectare adjustment systems of agricultural hydraulic pressure sprayers.
- ISO 9898: 2000 Equipment for crop protection – Test methods for air-assisted sprayers for bush and tree crops.
- ISO 22522:2007 Crop protection equipment – Field measurement of spray distribution in tree and bush crops.
- ISO 22866:2005 Equipment for crop protection – Methods for field measurements of spray drift.
Aquestes aplicacions d’anàlisi de la qualitat i eficiència es fan mitjançant l’ús de traçadors (quelats metàl·lics, colorants alimentaris, colorants fluorescents, ...) que permeten analitzar la deposició en fulla, en fruit, en sòl o en la superfície de l’objecte que es col·loqui com a col·lector. Alternativament també es pot fer una anàlisi de la qualitat de l’aplicació de forma més qualitativa utilitzant papers hidrosensible, un mètode utilitzat en jornades de demostració en camp per a la comprovació de l’efecte dels ajustos realitzats en els equips de tractament. En la Figura 1 es pot observar el procediment per a l’extracció del traçador de les fulles en un assaig de deposició, i en la Figura 2 un exemple dels resultats de deposició que permeten analitzar com ha arribat el producte en una secció de vegetació de vinya d’una parcel.la amb dos nivells de desenvolupament vegetatiu, en aquest cas.
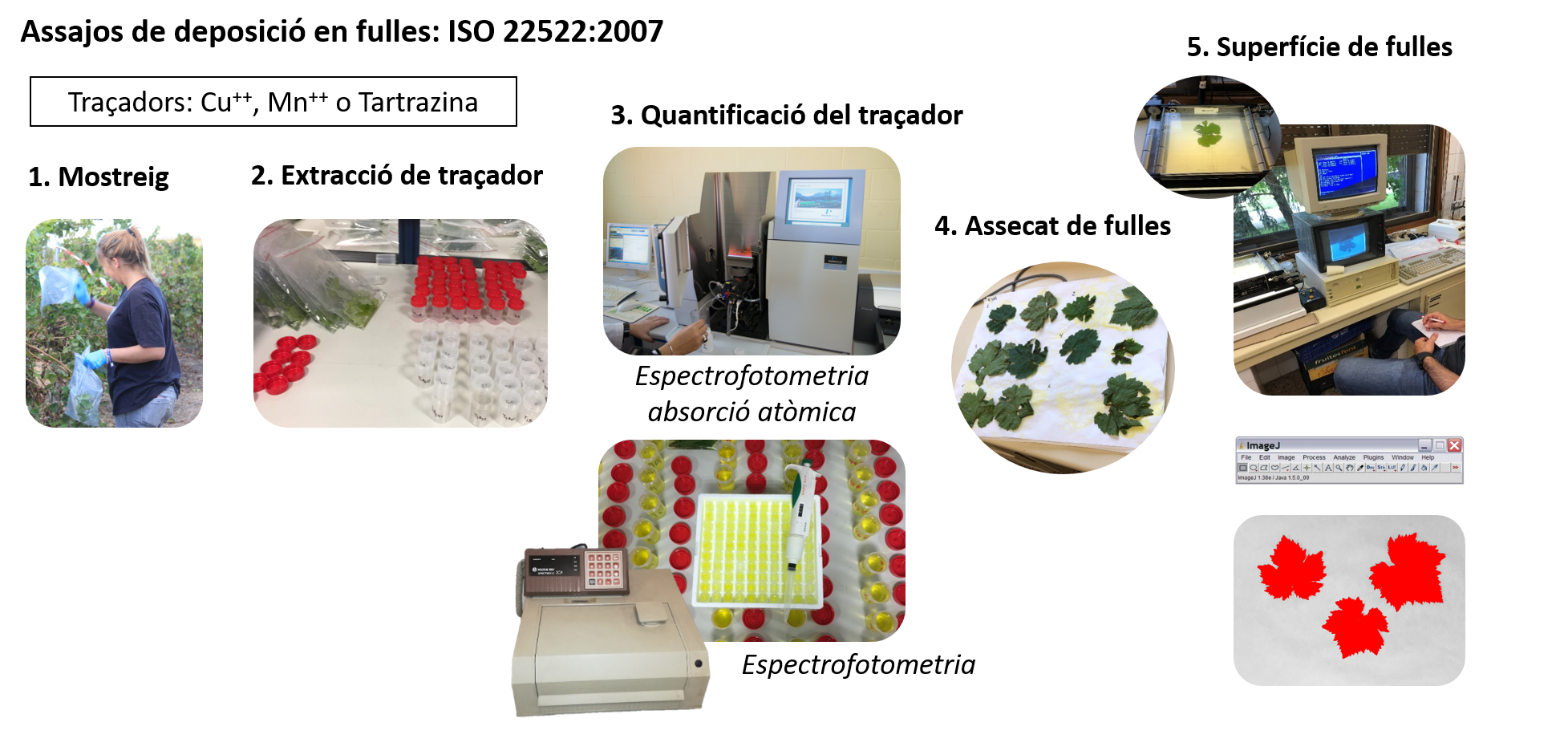
Figura 1. Procediment utilitzat en un assaig de deposició en fulla seguint el protocol ISO 22522:2007.
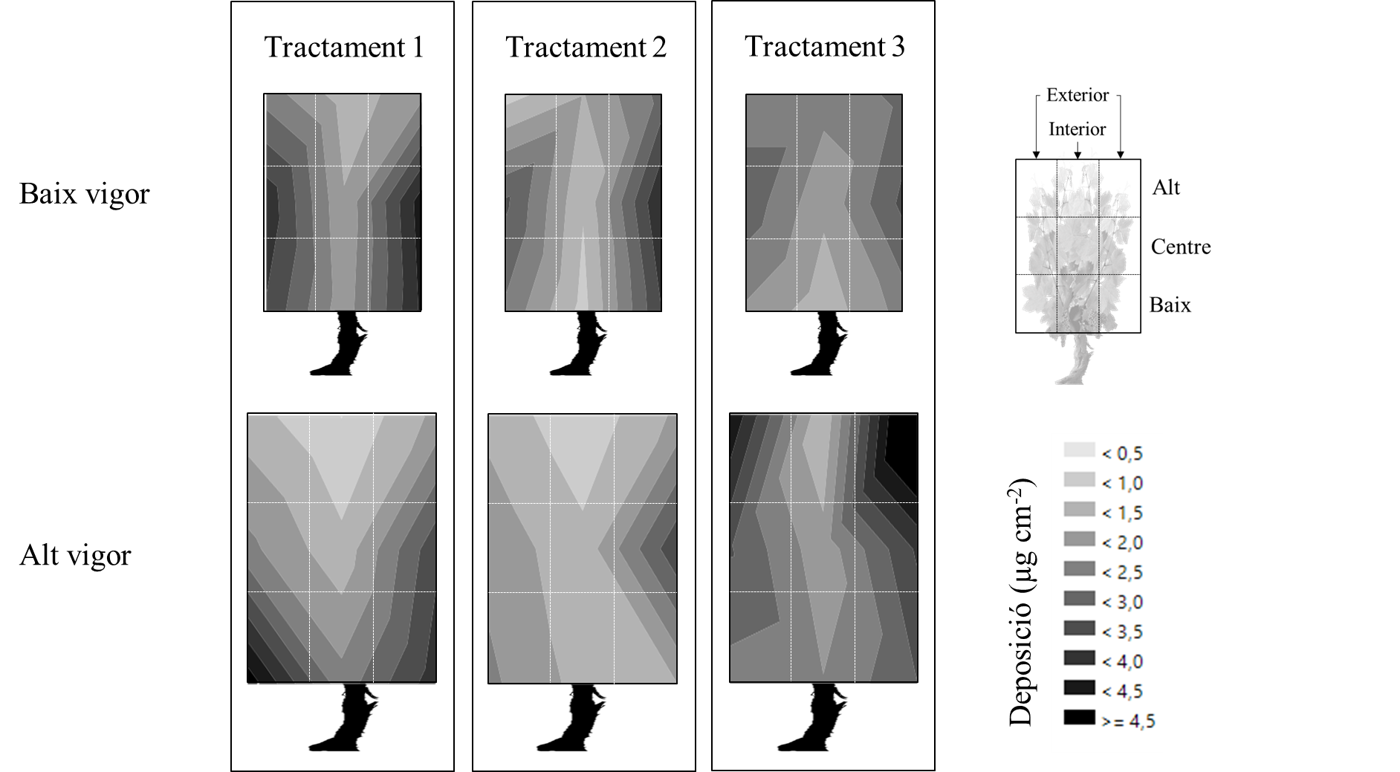
Figura 2. Exemple de gràfic de resultats de deposició en dos tipus de vegetació (Baix vigor i Alt vigor).
Ajust de dosi
El grup de recerca GRAP durant els últims anys ha desenvolupat una eina web que facilita el procés d’ajust de dosi en aplicacions de fitosanitaris en cultius arboris. Per a això, el sistema DOSA3D calcula el volum d'aplicació òptim estimant l'índex de superfície foliar i tenint en compte l'eficiència global de l’aplicació i la plaga o malaltia a controlar. L’eina es pot trobar gratuïtament en la següent pàgina web: http://www.dosa3d.cat (Figura 3).

Figura 3. Caràtula de la pàgina web de DOSA3D.
Aquesta eina s’ha validat gràcies a diferents treballs de camp que es poden consultar en les següents referències d’articles científics (Planas et al., 2012; Román et al., 2022, 2021, 2020).
En l’última actualització del sistema, s’ha introduït una eina per facilitar la selecció dels broquets adequats al tractament i la determinació de la pressió de treball, ja sigui en tractaments a dosi uniforme o en tractaments mitjançant mapa de zones en què la dosi s'adapta a les variacions de vigor intraparcel.la.
Sistemes electrònics de control
Els polvoritzadors més habituals ajusten el volum d’aplicació impulsant el líquid que surt pels broquets a una determinada pressió. El volum d’aplicació final (L.ha-1) depèn del cabal que proporciona el conjunt de broquets (en L.min-1), la velocitat d’avançament (km.h-1) i l’amplada de treball (m). En un tractament convencional s’aconsegueix aportar un volum d’aplicació homogeni tot mantenint la velocitat d’avançament constant i la pressió de treball. O si és el cas, ajustant proporcionalment un dels paràmetres quan varia l’altre paràmetre. Per aconseguir una polvorització variable és necessari instal·lar algun tipus de tecnologia que permeti regular el volum d’aplicació a les característiques de la vegetació. Entre els sistemes disponibles per a l’aplicació variable trobem els que actuen sobre el cabal emès pels broquets. En la Taula 1 es mostren els sistemes més utilitzats en cultius arboris.
Taula 1. Tecnologies que actuen sobre el cabal dels broquets.
|
Tecnologia |
Descripció |
Referencies |
|
Sistema on/off |
Control mitjançant electrovàlvules que permeten l’obertura o el tancament del circuït d’alimentació (sector) dels broquets |
(Wellington et al., 2012) |
|
Electrovàlvules proporcionals |
Modificació del cabal dels broquets modificant la pressió o modificant la freqüència de treball de les electrovàlvules |
(Campos et al., 2021; Escolà et al., 2013; Llorens et al., 2010) |
|
Electrovàlvules polsants de modulació d’ample de puls |
Regulació de l’ample de cicle (obert/tancat) a una mateixa pressió de treball per tal de controlar el cabal de sortida dels broquets (sistema pulse with modulation, PWM) |
(Llorens and Hewitt, 2019; Salcedo et al., 2020) |
En tot el procés de d’ajust de l’aplicació mitjançant els sistemes electrònics de control és important tenir en compte la possibilitat de realitzar la traçabilitat de les aplicacions. Avui en dia molts sistemes de control de polvorització permeten aquesta funcionalitat. En aquest procés es enregistra determinats paràmetres de l’aplicació per tal de controlar quin volum d’aplicació s’està realitzant. Aquesta informació permet analitzar les àrees de la parcel.la on el volum real aplicat difereix del volum real planificat, ja sigui per subdosificació o per sobredosificació. Aquestes dues situacions han d’evitar pel risc de generar problemes, ja sigui per increment de costos, fitotoxicitat o exposició ambiental i personal no desitjada.
Aplicació variable de productes fitosanitaris
Existeixen dos enfocaments a l'aplicació variable: aplicació variable a temps real i basada en mapes de prescripció.
A l'aplicació variable a temps real, els sensors que permeten llegir l’objectiu (vegetació principalment) van muntats sobre el tractor o polvoritzador i a mesura que l’equip avança entre les files del cultiu s’ajusta la dosis de forma contínua.
S'han desenvolupat diversos prototips de polvoritzadors d'aplicació variable a temps real (Abbas et al., 2020). Entre els més destacats hi ha, per una banda, els prototips que caracteritzen la vegetació en trams d'alçada amb un nombre variable de sensors d'ultrasons i permetent aplicar diferents volums d’aplicació a cada estrat en altura (Escolà et al., 2013; Gil et al., 2007; Llorens et al., 2010). D'altra banda, els prototips que integren l'escaneig de la vegetació amb sistema LiDAR i l'aplicació variable amb vàlvules PWM (Pulse Width Modulation) (Chen et al., 2020; Salcedo et al., 2020).
En referència a l'aplicació variable sobre la base de mapes, la caracterització de la vegetació es fa amb l'objectiu de diferenciar zones de maneig. Amb aquesta finalitat es poden utilitzar sensors LiDAR (del-Moral-Martínez et al., 2020) o imatges multiespectrals (Campos et al., 2019; Román et al., 2022, 2021, 2020). Un cop diferenciades les zones de maneig, el mapa de prescripció es genera assignant una dosi a cada zona (Figura 4). El mapa de prescripció es carrega en un monitor embarcat a l’electrònica de control de la màquina que variarà la pressió de treball de forma automàtica.
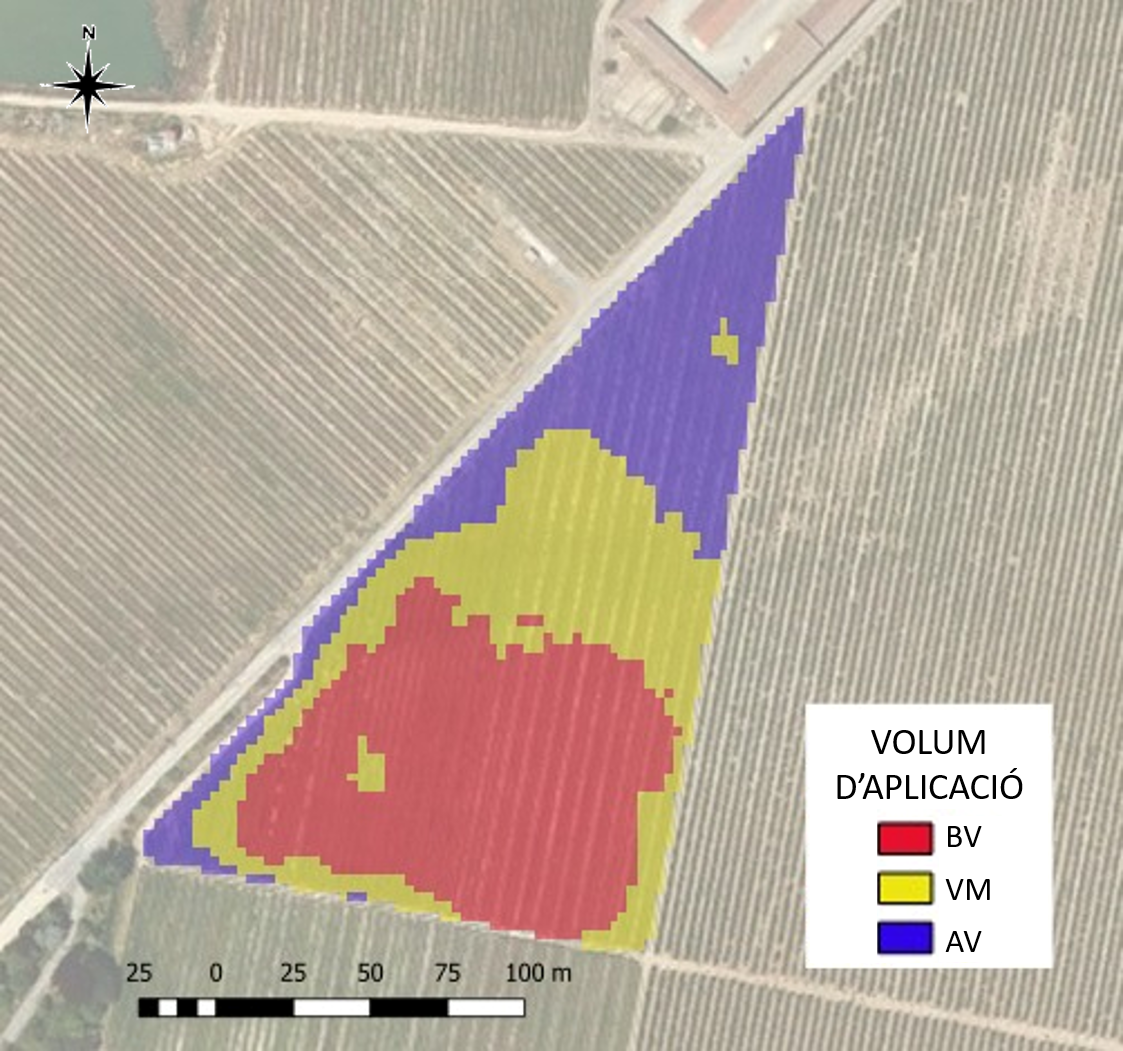
Figura 4. Mapa d'aplicació. BV: Baix volum, VM: Volum mig i AV: Alt Volum.
L'aplicació variable en temps real permet una actuació més precisa, ja que la caracterització de la vegetació i l'ajustament de dosis es fa de manera contínua, aconseguint estalvis de producte entre el 30% i el 80% (Wandkar et al., 2018). En canvi, la dosificació en base a mapes acostuma a diferenciar un nombre inferior de zones de maneig (2 o 3), per la qual cosa el potencial d'estalvi es preveu inferior. Tot i això, l'electrònica embarcada en aquest segon tipus és menor, i permet disminuir costos i problemes operatius.
Detecció i quantificació de la deriva mitjançant LiDAR
Existeixen diferents tècniques utilitzades per a mesurar la deriva produïda en l’aplicació de productes fitosanitaris, com són l’ús de col·lectors naturals o artificials, l’ús de col·lectors actius o passius i l’ús de tecnologia LiDAR (LIght Detection And Ranging). En aquest últim sistema es centra aquesta sub-línia de recerca.
Un sistema LIDAR és un instrument de teledetecció similar a un radar, amb la diferència que emet llum (làser) enlloc d’ones de radio. El funcionament d’un LIDAR consisteix en l’emissió d’un feix làser cap a un blanc (en aquesta aplicació, el blanc està constituït per un núvol de deriva provinent de la polvorització) que retrodispersa parcialment aquesta llum (és a dir, retorna cap al receptor). Els fotons que arriben al receptores es recullen amb un telescopi i un sistema fotodetector i s’enregistra com una funció en relació al temps. Coneguda la velocitat de la llum (~ 3x108m/s) podem calcular la distància que han viatjat els fotons d’anada i tornada (temps de vol). La interacció entre el feix làser emès (generalment polsat) i els aerosols i molècules atmosfèrics està subjecta a les lleis de dispersió o scattering (Rayleigh, Mie y Raman, principalment) i d’absorció, de manera que aquesta interacció es manifesta en una extinció o pèrdua exponencial d’energia a mesura que el feix làser es propaga per l’atmosfera.
Les aplicacions dels sistemes LIDAR són enormes, entre les que s’inclouen la mesura de la densitat d’aerosols, velocitat i direcció del vent, concentració d’espècies químiques, perfils de temperatura i estudis de ceilometria (altura i espessor dels núvols). En el camp mediambiental, els sistemes LIDAR permeten detectar i monitoritzar la dispersió dels aerosols i altres contaminants.
Al llarg dels darrers anys, diversos estudis han utilitzat sistemes LIDAR per mesurar la deriva. L’any 2009 a 2021 es va dur a terme una campanya experimental en la que es van realitzar diferents assajos de polvorització terrestre. Per a la mesura de la deriva es van utilitzar simultàniament un sistema LIDAR UV (ultravioleta) i dos tipus de col·lectors passius (fils de niló i paper hidrosensible) anàlegs als utilitzats en assajos. Amb aquest treball es va concloure que el LIDAR és una tècnica adequada per a la mesura de la deriva de pesticides ja que va ser possible relacionar les seves mesures amb les obtingudes pels col·lectors (Gregorio et al., 2016, 2014; Torrent et al., 2020).
Com a continuació dels anteriors treballs, el Grup de Recerca en AgròTICa i Agricultura de Precisió ha desenvolupant un sistema LIDAR per a la detecció i mesura de la deriva atmosfèrica de productes fitosanitaris i altres tipus d’aerosols, mostrat a la Figura 6. El sistema consta d’un subsistema emissor (làser) i d’un subsistema receptor (telescopi + mòdul fotodetector) que permet la captació d’una fracció de la llum que retorna al detector després d’haver impactat amb el blanc que es vol detectar i caracteritzar (en aquest cas, el núvol de deriva atmosfèrica produït per un polvoritzador agrícola, pols, fum, etc). L’apuntament del LIDAR es realitza mitjançant un sistema electromecànic amb dos graus de llibertat: en azimut i elevació. El resultat de la llum capturada pel mòdul fotodetector son impulsos de tensió els quals han de ser enregistrats i processats per un sistema electrònic d’adquisició de dades d’altes prestacions.
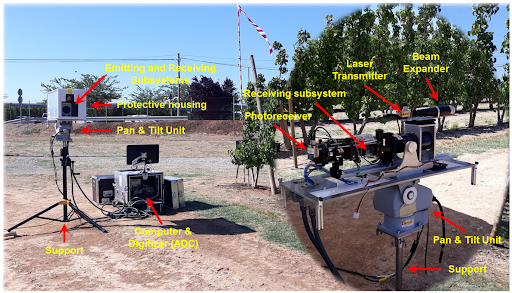
Figura 5. Sistema LiDAR (esquerra) per a la mesura de la deriva. Zoom dels subsistemes d’emissió i recepció sense la carcassa de protecció (dreta).
Referències
Abbas, I., Liu, J., Faheem, M., Noor, R.S., Shaikh, S.A., Solangi, K.A., Raza, S.M., 2020. Different sensor based intelligent spraying systems in Agriculture. Sensors Actuators A Phys. 316, 112265. https://doi.org/10.1016/j.sna.2020.112265
Campos, J., Llop, J., Gallart, M., García-Ruiz, F., Gras, A., Salcedo, R., Gil, E., 2019. Development of canopy vigour maps using UAV for site-specific management during vineyard spraying process. Precis. Agric. 20, 1136–1156. https://doi.org/10.1007/s11119-019-09643-z
Chen, L., Wallhead, M., Reding, M., Horst, L., Zhu, H., 2020. Control of Insect Pests and Diseases in an Ohio Fruit Farm with a Laser-guided Intelligent Sprayer. Horttechnology 30, 168–175. https://doi.org/10.21273/HORTTECH04497-19
del-Moral-Martínez, I., Rosell-Polo, J.R., Uribeetxebarria, A., Arnó, J., 2020. Spatially variable pesticide application in vineyards: Part I, developing a geostatistical approach. Biosyst. Eng. 195, 17–26. https://doi.org/10.1016/j.biosystemseng.2020.04.014
Escolà, A., Rosell-Polo, J.R.R., Planas, S., Gil, E., Pomar, J., Camp, F., Llorens, J., Solanelles, F., Escolà, A., Rosell-Polo, J.R.R., Planas, S., Gil, E., Pomar, J., Camp, F., Llorens, J., Solanelles, F., 2013. Variable rate sprayer. Part 1 - Orchard prototype: Design, implementation and validation. Comput. Electron. Agric. 95, 122–135. https://doi.org/10.1016/j.compag.2013.02.004
Gil, E., Escolà, A., Rosell, J.R., Planas, S., Val, L., 2007. Variable rate application of plant protection products in vineyard using ultrasonic sensors. Crop Prot. 26, 1287–1297. https://doi.org/10.1016/j.cropro.2006.11.003
Gregorio, E., Rosell-Polo, J.R., Sanz, R., Rocadenbosch, F., Solanelles, F., Garcerá, C., Chueca, P., Arnó, J., del Moral, I., Masip, J., Camp, F., Viana, R., Escolà, A., Gràcia, F., Planas, S., Moltó, E., 2014. LIDAR as an alternative to passive collectors to measure pesticide spray drift. Atmos. Environ. 82, 83–93. https://doi.org/10.1016/j.atmosenv.2013.09.028
Gregorio, E., Torrent, X., de Martí, S.P., Solanelles, F., Sanz, R., Rocadenbosch, F., Masip, J., Ribes-Dasi, M., Rosell-Polo, J.R., 2016. Measurement of spray drift with a specifically designed lidar system. Sensors (Switzerland) 16, 1–15. https://doi.org/10.3390/s16040499
Llorens, J., Gil, E., Llop, J., Escolà, A., 2010. Variable rate dosing in precision viticulture: Use of electronic devices to improve application efficiency. Crop Prot. 29. https://doi.org/10.1016/j.cropro.2009.12.022
Román, C., Arnó, J., Planas, S., 2021. Map-based zonal dosage strategy to control yellow spider mite (Eotetranychus carpini) and leafhoppers (Empoasca vitis & Jacobiasca lybica) in vineyards. Crop Prot. 147, 105690. https://doi.org/10.1016/j.cropro.2021.105690
Román, C., Llorens, J., Uribeetxebarria, A., Sanz, R., Planas, S., Arnó, J., 2020. Spatially variable pesticide application in vineyards: Part II, field comparison of uniform and map-based variable dose treatments. Biosyst. Eng. 195, 42–53. https://doi.org/10.1016/j.biosystemseng.2020.04.013
Román, C., Peris, M., Esteve, J., Tejerina, M., Cambray, J., Vilardell, P., Planas, S., 2022. Pesticide dose adjustment in fruit and grapevine orchards by DOSA3D: Fundamentals of the system and on-farm validation. Sci. Total Environ. 808, 152158. https://doi.org/10.1016/j.scitotenv.2021.152158
Salcedo, R., Zhu, H., Zhang, Z., Wei, Z., Chen, L., Ozkan, E., Falchieri, D., 2020. Foliar deposition and coverage on young apple trees with PWM-controlled spray systems. Comput. Electron. Agric. 178, 105794. https://doi.org/10.1016/j.compag.2020.105794
Torrent, X., Gregorio, E., Rosell-Polo, J.R., Arnó, J., Peris, M., van de Zande, J.C., Planas, S., 2020. Determination of spray drift and buffer zones in 3D crops using the ISO standard and new LiDAR methodologies. Sci. Total Environ. 714, 136666. https://doi.org/10.1016/j.scitotenv.2020.136666
Wandkar, S.V., Bhatt, Y.C., Jain, H.K., Nalawade, S.M., Pawar, S.G., 2018. Real-Time Variable Rate Spraying in Orchards and Vineyards: A Review. J. Inst. Eng. Ser. A 99, 385–390. https://doi.org/10.1007/s40030-018-0289-4