Conceptes bàsics de l'Agricultura de Precisió

Segons la Societat Internacional d’Agricultura de Precisió (ISPA), l’Agricultura de Precisió és una estratègia de gestió que recull, processa i analitza dades temporals, espacials i individuals i les combina amb altres informacions per a recolzar les decisions de maneig d’acord amb la variabilitat estimada, i així millorar l’eficiència en l’ús de recursos, la productivitat, la qualitat, la rendibilitat i la sostenibilitat de la producció agrícola (www.ispag.org/about/definition).
En una definició més curta, la mateixa ISPA defineix l’AP com una estratègia de gestió que considera la variabilitat temporal i espacial per a millorar la sostenibilitat de la producció agrícola.
L’Agricultura de Precisió (AP) és una de les conseqüències del desembarcament de les tecnologies de la informació i la comunicació a l'agricultura, que podem anomenar AgròTICa. El desenvolupament de nous sistemes sensorials, de plataformes de transport i sistemes informàtics dels darrers anys permet l'adquisició de dades del cultiu i del seu entorn, el seu processament per a convertir-les en informació útil i el tractament i emmagatzematge de la informació obtinguda per facilitar la presa de decisions sobre el maneig a realitzar. Disposar d’informació detallada sobre característiques del cultiu i del seu medi (sòl, clima, etc.) ajuda l'agricultor/a i als tècnics/es a prendre decisions més ben fonamentades. Tot agricultor sap que els seus camps no produeixen exactament el mateix en tota la seva extensió. Tot i així, no és fins que es quantifiquen aquestes diferències en la productivitat que es veu la magnitud que pot arribar a tenir aquesta variabilitat. El tenir en compte aquesta variabilitat en el maneig de les parcel·les és l'objectiu de l’Agricultura de Precisió.
Aquesta informació permet plantejar-se la primera pregunta important: continuar amb un maneig uniforme tradicional (aplicar a tot el camp la mateixa dosi de fertilitzants, reg, fitosanitaris, etc.) o bé crear zones de maneig específic dins del camp i aplicar-hi dosis diferents. Aquest darrer tipus de maneig es denomina Maneig Específic Localitzat (de l'anglès Site-Specific Management) i consisteix a realitzar labors agrícoles o aplicacions de recursos de forma variable a zones de la parcel·la que així ho justifiquin. Més encara, en determinats casos, com ara en els cultius arboris, es pot arribar (i s'arribarà aviat!) al maneig de les explotacions a nivell de planta individual.
Així doncs, l’AP no consisteix simplement en digitalitzar i utilitzar dades digitals o bé en incorporar tecnologies concretes als equips agrícoles. L’AP, tal com indica l’ISPA en la seva definició oficial, ha de seguir un cicle concret que consisteix en adquirir o recopilar dades, convertir-les en informació útil per a l’agricultor/a o tècnic/a, fer servir la informació per a prendre decisions de maneig i, finalment, realitzar les operacions o actuacions pertinents al camp (veure el cicle de l’AP).


Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
El cicle de l'Agricultura de Precisió
El cicle de l'Agricultura de Precisió (AP) contempla les 4 etapes que es mostren a la Figura 1.
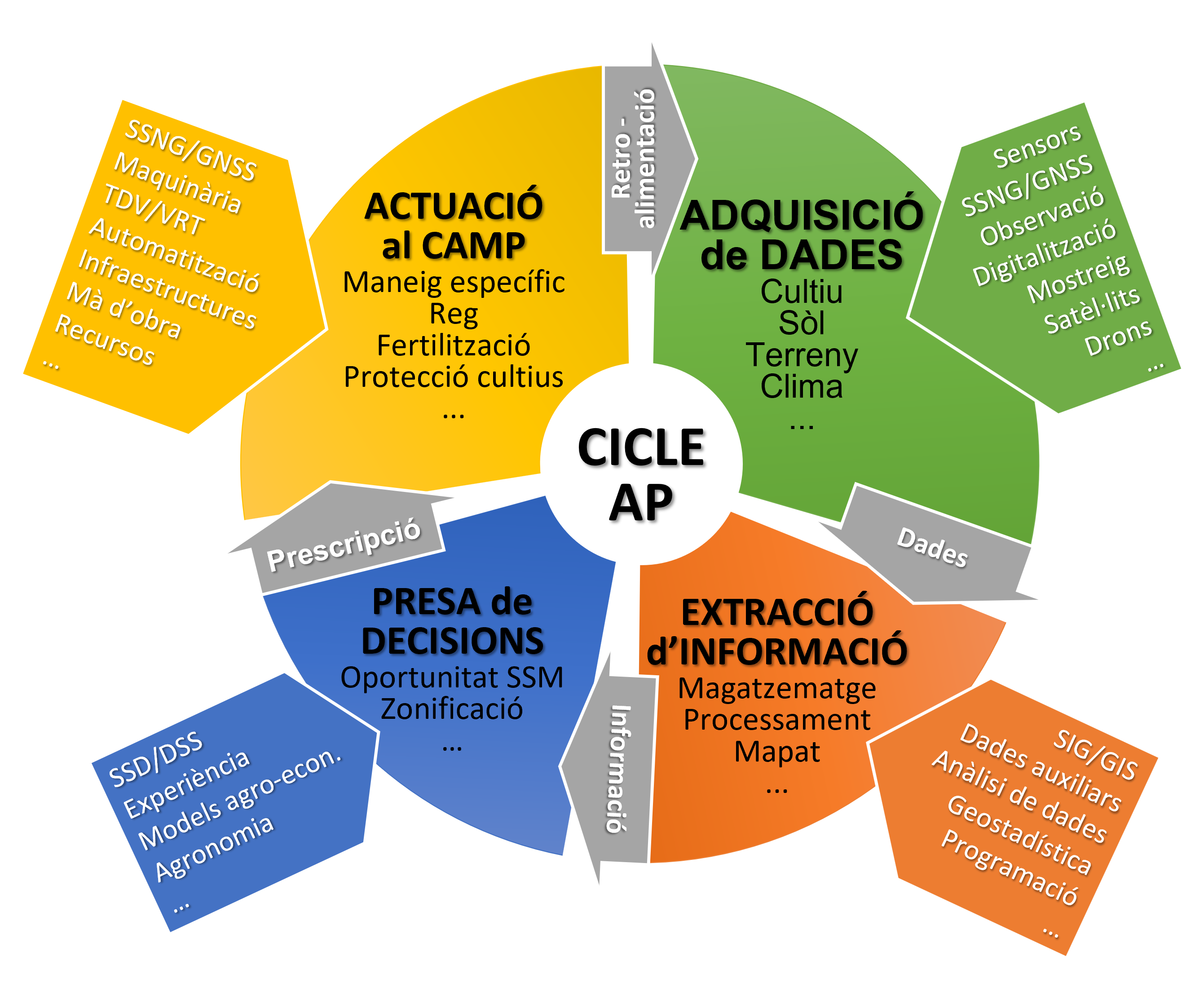
Figura 1. Cicle de l’Agricultura de Precisió.
El cicle comença amb l'Adquisició de dades del cultiu i del seu medi. Per a fer-ho es fan servir sensors, observacions visuals i mostrejos convencionals que cal georeferenciar, principalment amb l'ús de sistemes satel·litaris de navegació global (SSNG/GNSS). Aquestes dades poden ser sobre la geometria del cultiu, sobre la quantitat de biomassa i la seva estructura, sobre el seu vigor, sobre el seu estat de salut, sobre les característiques del sòl, etc. Les dades s’obtenen amb diferents mitjans i tecnologies, recollides a la fletxa verda del cicle. Una vegada obtingudes les dades, cal Extreure'n informació útil per a que l'agricultor/a i/o el tècnic/a puguin prendre millors decisions. Una de les informacions obtingues és si el cultiu es desenvolupa correctament i de forma uniforme en tota la parcel·la o bé, en cas de que presenti variabilitat, com es distribueix en el camp o parcel·la. Les eines utilitzades més habitualment per a analitzar i extreure informació de les dades es mostren a la fletxa taronja. Aquesta informació es farà servir a l'etapa de Presa de decisions, una etapa en que es decideixen les operacions de maneig agronòmic i de quina manera s’han de dur a terme. En Agricultura de Precisió, la primera decisió sol ser si es continua fent un maneig uniforme del camp o bé si aquest presenta una variabilitat tal que recomana fer un maneig diferenciat. Aquest maneig implica decidir si s'aplica o no un determinat recurs a les diferents zones del camp (fertilitzant, reg, fitosanitaris, sembra, etc.) i amb quina dosi cal aplicar-lo. Actualment, aquesta etapa és un dels colls d'ampolla de l'AP i la que requereix més investigació. Finalment, cal Actuar al camp per tal d'aplicar els recursos o realitzar les operacions necessàries. Si l'actuació ha de ser diferenciada, és possible que necessitem utilitzar les anomenades Tecnologies d'Actuació Variable, en anglès Variable Rate Technologies (VRT), que permeten que els equips s'autoregulin per a modificar les dosis d'aplicació d'acord amb la prescripció elaborada en l'etapa de presa de decisions. Tanmateix, també es pot fer Agricultura de Precisió amb equips convencionals. Tot dependrà de com sigui la variabilitat de la parcel·la i com s’estructuri espacialment.
A la Figura 2 es mostra un esquema on es relaciona la definició oficial de l’Agricultura de Precisió de la ISPA amb el cicle de la Figura 1. Com es pot apreciar, les diferents etapes del cicle coincideixen perfectament amb la definició:
L’Agricultura de Precisió és una estratègia de gestió que recull, processa i analitza dades temporals, espacials i individuals i les combina amb altres informacions per a recolzar les decisions de maneig d’acord amb la variabilitat estimada, i així millorar l’eficiència en l’ús de recursos, la productivitat, la qualitat, la rendibilitat i la sostenibilitat de la producció agrícola.

Figura 2. Interrelació entre la definició de l’Agricultura de Precisió de la ISPA i el seu cicle.
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Metodologies de l'Agricultura de Precisió
Les diferents operacions de maneig basades en l’Agricultura de Precisió (AP) es poden dur a terme seguint tres metodologies diferents:
- Agricultura de Precisió basada en mapes
- Agricultura de Precisió en temps real
- Fusió de les dos anteriors
En tots els casos, les operacions han de seguir les 4 etapes del cicle de l’AP. La diferència entre elles rau en quins són els resultats de cada etapa i, principalment, el temps que es tarda en completar tot el cicle. A continuació es descriuen cadascuna de les metodologies i les seves característiques.
1) Agricultura de Precisió basada en mapes
Aquesta metodologia consisteix en generar i utilitzar mapes digital d’informació durant tot el cicle de l’AP. En la primera etapa, ADQUISICIÓ, s’utilitzen sensors propers i remots per a l’adquisició de dades amb una alta resolució espacial. Els sensors utilitzats poden ser sensors radiomètrics, sensors de conductivitat elèctrica aparent del sòl, monitors de collita, sensors òptics, etc. El resultat d’aquestes mesures són llistats de dades discretes (puntuals) georeferenciades de les diferents lectures obtingudes o imatges de dron o satèl·lit. En la segona etapa, EXTRACCIÓ D’INFORMACIÓ, s’utilitzen tècniques geoestadístiques per a generar mapes continus de la distribució espacial de les dades dels sensors. Per exemple, es poden obtenir mapes de rendiment o de collita, mapes del vigor o desenvolupament del cultiu, mapes de la conductivitat elèctrica del sòl o mapes de les dimensions de la vegetació, entre d’altres. En aquesta segona etapa també s’analitza la variabilitat de les dades dels mapes amb tècniques estadístiques i es correlacionen amb altres mapes per veure si es poden crear zones que es comportin de manera similar dins del mateix camp. En la tercera etapa, PRESA DE DECISIÓ, s’analitzen tots els mapes generats i, si la variabilitat del cultiu o del sòl ho justifica, es pren la decisió de què fer en cadascuna de les zones del camp. Aquesta decisió pot ser una aplicació variable de fertilitzant o de reg o de sembra o de productes fitosanitaris i, en tots el casos, el format d’aquesta descripció és un mapa de prescripció, és a dir, un mapa del camp a tractar amb les diferents zones i amb les dosis del recurs a aplicar. Així, es pot generar un mapa de prescripció de l’aplicació de fertilitzant o de reg o de sembra o de producte fitosanitari, entre d’altres. Finalment, en la darrera etapa del cicle, l’ACTUACIÓ EN CAMP, cal portar a la pràctica el mapa de prescripció. Alguns equips són capaços de carregar i executar automàticament els mapes de prescripció. Són els que incorporen les anomenades Tecnologies de Dosificació Variable (o, en anglès, Variable-Rate Technologies o VRT). Però també seria possible executar els tractaments amb equips convencionals i les zones de maneig estan convenientment distribuïdes i estructurades.
En el cas de l’Agricultura de Precisió basada en mapes, el cicle acostuma a durar alguns dies, depenent del temps que es necessiti per a fer les mesures de camp, processar-les per a crear els mapes, analitzar-los per a prendre decisions i tornar a camp per a executar el mapa de prescripció (Figura 1).
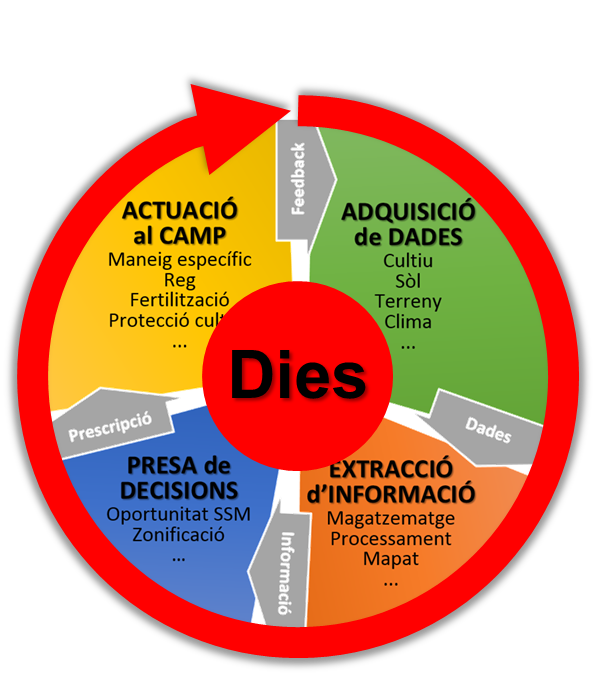
Figura 1. Cicle de l’Agricultura de Precisió basada en mapes.
El que és imprescindible tant en la primera com en la darrera etapa és l’ús dels sistemes satel·litaris de navegació global (SSNG). En la primera, és imprescindible georeferenciar les mesures dels sensors i, en la darrera, cal saber en tot moment la posició de l’equip per tal de saber què cal fer en cada zona del camp d’acord amb el mapa de prescripció.
Un avantatge interessant d’aquesta metodologia és que l’agricultor/a pot saber abans d’anar al camp la quantitat del recurs que ha de carregar a l’equip donat que el mapa de prescripció indica les dosis per hectàrea i la superfície de cada zona. Això és especialment important en el cas dels productes fitosanitaris, en que cal evitar romanents importants una vegada acabada l’operació.
2) Agricultura de Precisió en temps real
En l’Agricultura de Precisió en temps real, tot el cicle es duu a terme sobre a marxa (on-the-go, que diuen els anglesos) i en qüestió de mil·lisegons. En aquest cas, els arreus o atifells VRT van equipats amb sensors, controladors i actuadors, de manera que els primers fan la mesura, els segons analitzen els senyals elèctrics i els converteixen en valors numèrics que es processen i es fan servir per a prendre decisions i, finalment, els actuadors fan que l’equip apliqui les quantitats necessàries d’aquell recurs determinat. I tot això es fa en dècimes o mil·lèsimes de segon (Figura 2). Exemples d’aplicacions en temps real serien l’aplicació variable de productes fitosanitaris en funció de les dimensions de la vegetació o la sembra variable de panís en funció de la matèria orgànica del sòl.

Figura 2. Cicle de l’Agricultura de Precisió en temps real.
En aquesta metodologia no és necessari l’ús de SSNG donat que l’equip mesura, decideix i actua de manera contínua i no ha de crear pas cap mapa. Tanmateix, seria molt interessant disposar d’un sistema de control de superposició per a evitar aplicar un recurs dos vegades sobre el mateix punt o bé generar mapes d’aplicació, és a dir mesures del que realment fa l’equip en cada punt del camp. En tots dos casos cal disposar d’un receptor SSNG.
Un avantatge important d’aquesta metodologia és que la dosi aplicada de cada recurs es pot adaptar perfectament a cada punt del camp, mentre que amb l’aplicació en base a mapes, les dosis s’agrupen en zones de maneig i, per tant, no són tan específiques per a cada punt. Per contra, amb aquesta metodologia no és possible saber d’avant mà la quantitat de producte que s’aplicarà
3) Fusió de les dos anteriors
La fusió de les dos metodologies anteriors, com bé indica el seu nom, és una barreja entre l’AP basada en mapes i l’AP en temps real. Aquesta fusió es pot explicar amb un exemple d’aplicació de productes fitosanitaris en fruiters. Si es disposa d’un mapa de prescripció i d’un equip amb tecnologies de dosificació variable, l’equip aplicarà la dosi corresponent al lloc on es troba, determinat amb un receptor SSNG. Tanmateix, si en aquell punt hi falta un arbre perquè s’ha arrencat o s’ha mort, no té cap sentit aplicar producte fitosanitari. Si l’equip incorpora un sensor de presencia de vegetació podrà decidir si aplica producte o no en temps real. Es podria dir que el mapa de prescripció seria una aproximació macromètrica o macro i els sensors embarcats farien l’ajust micromètric o micro.
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Tècniques i tecnologies de l'Agricultura de Precisió
Donat que l’Agricultura de Precisió (AP) és una estratègia molt àmplia i transversal, les tècniques i tecnologies que hi participen són moltes i diverses. L’AP té fama d’utilitzar molt tecnologia digital i això la fa massa cara per a determinats sistemes de cultiu. Aquesta fama és força merescuda, tanmateix, a la definició d’AP de la International Society of Precision Agriculture la tecnologia no apareix esmentada per enlloc. Per tant, quan parla de recollir, processar i analitzar dades i dur a la pràctica les decisions preses, això es pot fer amb l’ajut de tecnologia digital o sense. És evident que la tecnologia facilita tots aquests processos però això no és un impediment en sistemes amb parecel·les petites o en el que es disposi d’alternatives com, per exemple, mà d’obra a un cost raonable. Per exemple, és possible prendre dades de l’estat del cultiu o de l’afectació de determinades plagues o malalties a partir d’observacions visuals i aquestes es poden georeferenciar en mapes impresos amb una quadrícula raonable. Una vegada preses les decisions de maneig en forma de mapes de prescripció (d’aplicació de fertilitzant o productes fitosanitaris, o de sembra, reg o altres), aquestes es podrien portar a la pràctica amb equips convencionals sempre que les variacions de les dosis a aplicar tinguessin uns patrons espacials fàcils d’executar. En la terminologia anglòfona, aquest tipus d’AP s’anomena Soft Precision Agriculture, que es podria traduir per AP suau.
De fet, aquest tipus d’agricultura amb molta precisió però sense tecnologia és el que pràcticaven els nostres besavis i besàvies i els seus avantpassats. El fet que ells trepitgessin els camps tot caminant al pas de bous i mules els permetia conèixer les seves parcel·les de tal manera que sabien exactament què calia fer a cada lloc per tal de treure’n el màxim profit (Figura 1). Ells i elles ja feien AP quan aplicaven una mica més de fem en les zones més productives i menys fem en les zones que no podien produir més. Ja aplicaven més herbicida a les zones on hi havia més males herbes o les arrencaven manualment quan convenia. Això que feien era ben bé Agricultura de Precisió. Amb l’arribada de la mecanització agrària, l’agricultor va perdre una mica el contacte amb el camp. Ja no s’hi passejava tant perquè anava damunt d’un tractor i per a poder-lo amortitzar calia treballar més de pressa per a poder acumular més superfície. Tant la mecanització com les diverses millores aconseguides en agronomia van aconseguir augmentar les produccions considerablement però el preu va ser treballar amb dosis i actuacions uniformes cadascuna de les parcel·les. S’havia de fer anar els tractors a velocitats elevades per a treballar més superfície i això feia impossible adaptar el maneig a les característiques de cada zona. A més, les parcel·les van anar augmentant la seva superfície i van passar d’un o diversos jornals de terra (aquella superfície que es podia treballar en una jornada) a tenir desenes i desenes d’hectàrees. Això va fer que, inevitablement, les parcel·les fossin cada vegada més variables.


Figura 1. Sega manual (cintraseupovo.blogspot.com/2011/08/uma-bela-historia.html) i
fertilització orgànica amb bous (trajinha-sempre-no-coracao.blogspot.com/2010/).
Actualment, els avenços tecnològics i el desenvolupament de sensors, controladors electrònics i actuadors més robustos i amb més capacitat de processament permeten arribar al detall de coneixement dels camps i dels cultius que tenien els nostres avantpassats i a permetre distribuir els diferents recursos agrícoles de manera variable per tal d’adaptar-se a la variabilitat del camp i a les característiques de cada zona. Així, en el moment que els equips convencionals ja no poden donar resposta a la variabilitat de les parcel·les, ja es possible trobar al mercat equips que utilitzen les anomenades Tecnologies de Dosificació o Aplicació Variable (en anglès, Variable-Rate Technologies). En anglès, aquesta agricultura més tecnificada rep el nom de Hard Precision Agriculture o AP dura. Donat que utilitza més tecnologia, aquesta agricultura tindrà també uns costos més elevat però els beneficis potencials també són més elevats. Caldrà fer una bona anàlisi econòmica per tal de decidir si pot ser rendible o no, independentment de les dimensions de l’explotació.
Moltes vegades, a aquesta agricultura més tecnificiada i digital se l’anomena Agricultura 4.0, seguint la terminologia que s’ha aplicat a la indústria. El problema aquí és que no hi ha una societat cientificotècnica darrera del concepte d’Agricultura 4.0 i, per tant, no hi ha cap definició oficial que aclareixi què és i, sobretot, què no és Agricultura 4.0. La conseqüència és que aquest terme es fa servir per a descriure situacions ben diferents. En el món industrial, la Indústria 4.0 és aquell estadi evolutiu d’una indústria tal que permet integrar tots els seus sistemes digitals distribuits preexistents (monitoratges amb sensors, automatitzacions de processos puntuals, bases de dades, robots, sistemes de suport a la presa de decisions, etc.) en un únic sistema ciberfísic que integri totes les dades i informacions generades i sigui capaç de prendre decisions globals per sí sol. Actualment, encara som lluny d’un sistema com aquest en una explotació agrícola i, per tant, el terme Agricultura 4.0 no és adequat. L’Agricultura de Precisió pot fer servir molta tecnologia, moltes solucions digital i, fins i tot, robots agrícoles. Tanmateix, encara no hi ha una integració íntima de tots aquests components en un sol sistema que sigui capaç de prendre decisions autònomament. Aquesta feina encara la fan els agricultors/es i les tècniques i tècnics. Seguint l’analogia de la indústria, es podria dir que una explotació tradicional estaria practicant Agricultura 2.0 i aquelles que apliquin estratègies d’AP estarien fent, com a molt, Agricultura 3.0. La Indústria o l’Agricultura 5.0 sembla que ha de ser aquella en que la planta industrial o tota l’explotació serà gestionada íntegrament per robots (Figura 2).
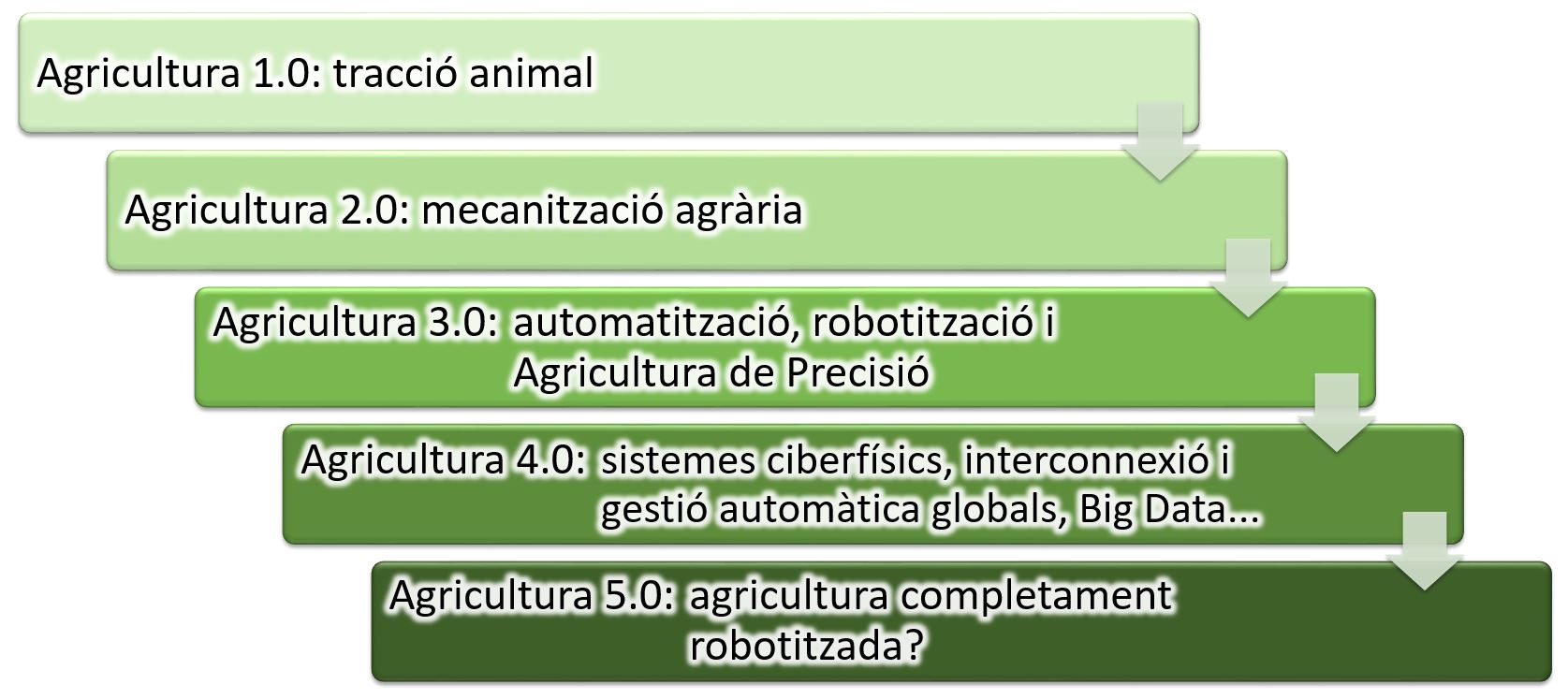
Figura 2. Evolució de l’agricultura segons la tecnologia aplicada.
El cicle de l’AP es divideix en 4 etapes: 1) adquisició de dades, 2) extracció d’informació, 3) presa de decisions i 4) actuació al camp. En totes elles hi podem trobar tècniques i tecnologies diverses que ajudaran tècnics i agricultors a millorar el seu maneig agronòmic. A continuació s’exposaran algunes de les tècniques i tecnologies de cada etapa del cicle.
Adquisició de dades
En aquesta etapa del cicle cal recollir dades sobre el cultius i el seu medi. Hi ha diverses tècniques i tecnologies disponibles comercialment i moltes altres encara en desenvolupament.
Donat que volem conèixer la variabilitat del cultiu al llarg i ample del camp, un dels requisits més importants en AP és que les dades obtingudes tinguin associades les coordenades d’allà on s’han generat. Per a fer-ho, el més habitual és fer servir els Sistemes Satel·litaris de Navegació Global (SSNG), en anglès Global Navigation Satellite Systems (GNSS). És a dir, sistemes basats en satèl·lits que permete obtenir les coordenades d’un punt i navegar (anar d’un punt conegut a un altre) per tot el món, de manera global. El més conegut d’aquests sistemes és el Global Positioning System o GPS. Tanmateix, n’hi ha 3 més: el GLONASS rus, el GALILEO europeu i el BEIDOU xinès (Figura 2). Actualment, els receptors utilitzats en agricultura són compatibles amb diversos o tots ells i, per tant, anomenar-los simplement GPS no és del tot correcte. El terme genèric és un receptor SSNG o GNSS. Amb aquests receptor podem georeferenciar la presa de mostes de sòl o de cultiu manuals o bé les lectures de sensors ja siguin discretes (en punts concrets) o en continu (mesures preses sobre la marxa, sense aturar-se).
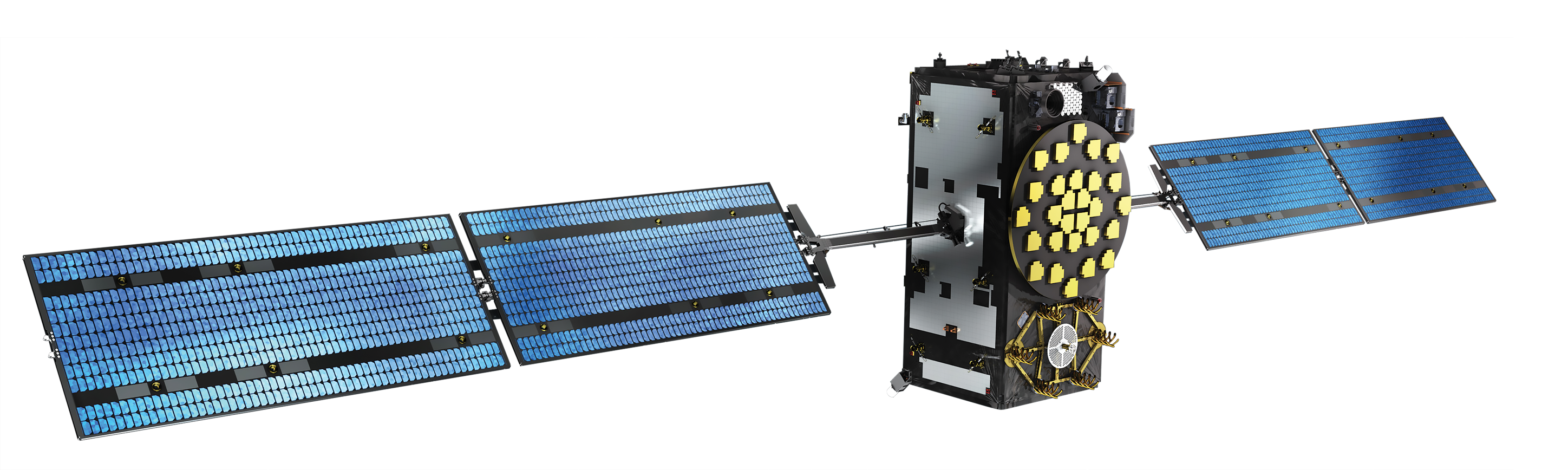
Figura 3. Reproducció d’un satèl·lit del Sistema Satel·litari de Navegació Global GALILEO
(Font: ©EUSPA, ©European Agency for the Space Programme).
Una altra de les tecnologies més emblemàtiques de l’AP és l’observació de la terra mitjançant sensors embarcats en satèl·lits, el que es coneix com a teledetecció (en anglès, Remote Sensing). Hi ha diversos tipus de sensors embarcats als satèl·lits però els més utilitzats en AP són els sensors radiomètrics o sensors òptics multiespectrals. Es tracta de sensors òptics perquè capturen la llum reflexada per la superfície terrestre i són multiespectrals perquè són capaços d’enregistrar llum de diverses longituds d’ona dins de l’espectre radioelèctric, a més de la llum visible vermella, verda i blava. Amb aquestes diferents longituds d’ona es poden construir diferents índex de vegetació que es relacionen amb paràmetres fisiològics de les plantes. El més conegut d’aquests índex és l’índex de vegetació de diferència normalitzada o Normalised Difference Vegetation Index o NDVI. Aquest índex, per exemple, es calcula amb la llum vermella i de l’infraroig proper que reflexen les plantes i és proporcional a l’activitat fotosintètica de les plantes i al seu estat. Des del inicis de la teledetecció, les característiques dels sensors i els productes ofertats han anat evolucionant molt de pressa. Actualment, és possible aconseguir imatges de satèl·lits amb una resolució de 10 m amb una freqüencia de 5 dies de qualsevol punt del món i de forma gratuïta gràcies a la missió Sentinel-2 del programa Copernicus de la Comissió Europea (Figura 3). També es possible aconseguir imatges amb resolucions espacials molt més elevades tot i que aquestes ja solen ser de pagament.
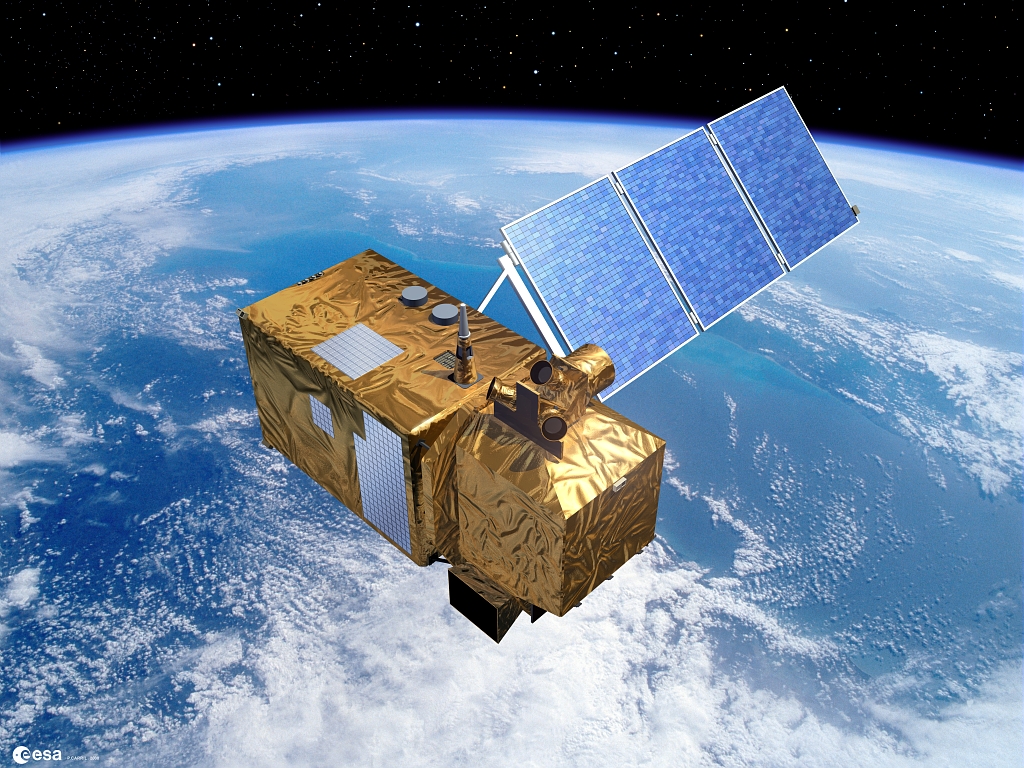
Figura 4. Satèl·lit de la missió Sentinel-2 del programa Copernicus (Font: ESA - P. Carril).
Un dels problemes de la teledetecció satel·litària és que els satèl·lits estan a altituds molt elevades (786 km en el cas dels satèl·lits Sentinel-2). Això fa que la llum del sol que els arriba reflexada per la superfície terrestre es vegi molt afectada per l’atmosfera o, fins i tot, que no es vegi la superfície terrestre degut a la presència de núvols. Afortunadament, el desenvolupament de nous sensors miniaturitzats i més assequibles ha permés que aquests puguin ser embarcats en avions tripulats i, fins i tot, en vehicles aeris no tripulats (o, en anglès, Unmanned Aerial Vehicles o UAV), altrament anomenats drons.
Una alternativa a la teledetecció és la utilització de sensors propers o terrestres. Tècnicament, la teledetecció és la mesura de paràmetres amb un dispositiu o sensor sense contacte amb l’objecte mesurat. Tot i això, en AP s’entén com a teledetecció la utilització de sensors sense contacte amb el terra i detecció propera o pròxima (en anglès, Proximal Sensing) quan el sensors o la plataforma on estan embarcats es recolzen a terra. En detecció propera es fan servir molts tipus de sensors i de principis de funcionament diferents. Hi ha sensors radiomètrics que realitzen mesures puntuals i altres que capturen matrius de mesures en forma d’imatges. Altres tipus de sensors òptics són els que utilitzen la llum per a mesurar distàncies i així obtenir mesures geomètriques dels cultius. Altres sensors realitzen mesures mecàniques de forces i deformacions. Alguns d’aquests sensors es fan servir per a mesurar la quantitat de gra net que puja a les tremuges de les recol·lectores. Aquesta dada, juntament amb les coordenades del lloc on s’ha segat permetran generar mapes de rendiment o de collita. Un altre grup de sensors es fa servir per a obtenir mapes de les característiques del sòl. Algunes d’aquestes tecnologies es descriuen en altres apartats del Repositori Digital d’Agricultura de Precisió.
També és important la digitalització de dades diverses que poden ser importants per a la presa de decisions de maneig. La digitalització no és més que convertir dades analògiques (en suport paper o observacions visuals, etc.) en dades digitals per a poder-les integrar a la segona etapa del cicle de l’AP, l’Extracció d’informació. En aquest punt, és molt importnat tenir en compte totes les dades digitals de caire administratiu que es poguin obtenir dels quaderns d’explotació digitals o de les dades obertes de les Administracions. Els telèfons mòbils o tauletes també són eines molt potents per a digitalitzar observacions visuals georeferenciades de l’estat dels cultius o de problemes amb infraestructures de l’explotació.
Extracció d’informació
En definitiva, actualment hi ha infinitat de sensors i cada vegada n’hi haurà més de disponibles. Això permet obtenir moltes dades tan dels cultius com del seu medi. Tanmateix, les dades per sí soles no tenen significat si no es filtren, es validen i es processen per a convertir-les en informació útil per ajudar a prendre decisions de maneig. En aquesta etapa hi participen moltes tècniques i tecnologies diferents com són les tècniques estadístiques per a descriure les dades, analitzar-les i correlacionar-les amb altres dades. Donat que moltes de les dades utilitzades en AP tenen associades les coordenades on s’han obtingut, en aquesta etapa també s’hi aplicaran processos geoestadístic, que permetran interpolar les dades obtingudes de forma discreta per a disposar de dades contínues per tal de generar mapes de les distribucions espacials de les mesures. En aquesta etapa hi juguen un paper important els Sistemes d’Informació Geogràfica o SIG (en anglès, Geographic Information Systems o GIS), que permeten visualitzar les dades georeferenciades, els mapes ràster o de superfície de les dades interpolades i editar aquestes dades per a convertir-les en informació. Les tècniques més habituals són la interpolació de dades per a generar mapes que té en compte la seva distribució espacial, anomenada krigatge (en anglès, kriging), la classificació o agrupació de dades similar per a la delimitació de zones dins d’una parcel·la, anomenada clusterització (en anglès, clustering) o la correlació i anàlisi de la variància de diferents capes de dades per tal de determinar la seva interacció.
Presa de decisions
Aquesta és, sens dubte, una de les etapes més complicades del cicle de l’AP. Una de les primeres decisions que caldrà prendre en AP és si es continua amb el maneig uniforme convenicional o bé s’opta per una estratègia de maneig variable per zones. Aquesta decisió ha de tenir en compte aspectes agronòmics però també aspectes tecnològics i aspectes econòmics. Els aspectes agrònomics, són evidents. Cal veure si la variabilitat del cultiu detectada en camp es pot corregir amb tècniques de maneig o no. Tanmateix, si es pot corregir, cal veure si es disposa de la tecnologia adequada per a fer-ho, ja siguin equips convencionals o més sofisticats. I, finalment, cal analitzar la rendibilitat de les solucions a adoptar, si els canvis a introduir en el maneig implicaran un increment de la rendibilitat de l’explotació o si, per contra, poden generar pèrdues.
En aquesta etapa cal tenir en compte, sobretot, els coneixements agronòmics i l’experiència de l’agricultor i dels tècnics, les solucions que s’adoptin en altres explotacions d’aquella zona i dades agroeconòmiques de que es pugui disposar. En alguns casos, tot aquest coneixement s’integra en sistemes informàtics que s’alimenten de dades concretes de l’explotació i ofereixen, com a sortida, una proposta de maneig, que sempre ha de ser validada per l’agricultor o el tècnic de l’explotació. Aquests sistemes s’anomenen Sistemes de Suport a la Decisió o SSD (en anglès, Decision Support Systems o DSS). Al Grup de Recerca en AgròTICa i Agricultura de Precisió hem elaborat un SSD, anomenat DOSA3D, per a tal d’ajustar els volums d’aplicació unitaris de productes fitosanitaris a les característiques de la plaga o malaltia a controla i, sobretot, a les dimensions de la vegetació en cultius arboris i vinya. Col·legues de la Unitat de Mecanització Agrària (UMA) de la Universitat Politècnica de Catalunya també han publicat un sistema de recomanacions i ajust de dosis específic per a vinya, el Dosaviña (Figura 5). Cal seguir treballant a nivell de recerca per tal de generar SSD que cobreixin totes les operacions de maneig per tal de facilitar la presa de decisions.


Figura 5. Pàgines web d’inici dels sistemes de suport a la decisió
DOSA3D (GRAP) i Dosaviña (UMA).
Actuació al camp
Finalment, una vegada preses les decisions, cal anar al camp i portar-les a la pràctica. Tal com es descriu al document Metodologies de l’Agricultura de Precisió, les prescripcions de les operacions de maneig poden ser en forma de mapes (AP basada en mapes) o bé poden ser decidides i executades en temps real (AP en temps real). En el cas dels mapes de prescripció, tal com s’ha explicat al començament d’aquest document, si el patró espacial de la variabilitat del camp ho permet, l’operació es podria arribar a executar amb equips convencionals. Per contra, si la variabilitat del camp exigeix dosis com canviants, el més adequat serà fer servir equips amb Tecnologies de Dosificació o Actuació Variable (en anglès, Variable-Rate Technologies o VRT). Aquests equips incorporen sensors, controladors i actuadors que els permeten autoajustar-se per tal d’aplicar dosis diferents en funció de mapes de prescripció prèviament elaborats i carregats als controladors dels equips o bé en funció de les lectures que realitzin els sensors en cas d’AP en temps real. En el primer cas, en AP basada en mapes, l’equip han d’incorporar un receptor SSNG per tal d’indicar al controlador en quin lloc del camp i troba i poder obtenir la dosi que hi correspon a partir del mapa de prescripció. En el segon cas, en AP en temps real, no és necessari disposar de receptors SSNG donat que l’actuació no depèn de la posició de l’equip sinó de les lectures dels sensors en aquell punt. Tanmateix, en els dos casos és molt interessant poder recollir dades georeferenciades del tractament o dosificació que finalment ha executat l’equip per tal de poder obtenir un mapa d’aplicació i validar l’actuació realitzada. Si el mapa d’apliació coincideix amb el de prescripció, el tractament s’ha executat correctament. Si no, caldrà pensar en accions correctores. Si no es disposa de mapa de prescripció, el mapa d’aplicació permetrà saber què s’ha fet en cada zona de la parcel·la i això pot ser molt útil per a futures actuacions.
Actualment ja hi ha força fabricants que embarquen tecnologies de dosificació variable als seus equips, cosa que els permet fer actuacions diferenciades per zones o específiques per a cada punt dels camps. Així, al mercat hi podem trobar sembradores i adobodores variables, polvoritzadors variables tant per a cultius extensius com per a cultius arboris i sistemes de reg variable (especialment pívots). El desenvolupament tecnològic d’aquests equips està facilitant l’adopció de l’Agricultura de Precisió.
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Posicionament i navegació: sistemes satel·litaris de navegació global - SSNG/GNSS
Tal com s’ha dit en altres documents d’aquest repositori, en Agricultura de Precisió (AP) és important saber on som. Les dades de posició es poden fer servir amb diverses finalitats (Figura 1). Bàsicament, saber on som ens permet enregistrar les dades de localització o georeferenciació de persones, equips, mostres o actuacions. Saber on som també permet anar a un altre lloc, altrament dit navegar. Sí, sí, es pot navegar pel mar però també per terra ferma i, fins i tot, per l’aire! En AP els dispositius utilitzats per saber on som són els receptors dels Sistemes Satel·litaris de Navegació Global (SSNG), en anglès anomenats Global Navigation Satellite Systems (GNSS). Així, un receptor SSNG permet determinar les coordenades de les extraccions de mostres de sòl o bé permet georeferenciar les dades d’un sensors o d’un equip (documentació de dades). També permet saber en quin punt del camp són els equips quan treballen i ajustar l’operació al lloc on són (control d’equips). Finalment, pel que fa a la navegació, els receptors SSNG permeten fer el guiatge d’equips i gestionar flotes senceres (Figura 1).
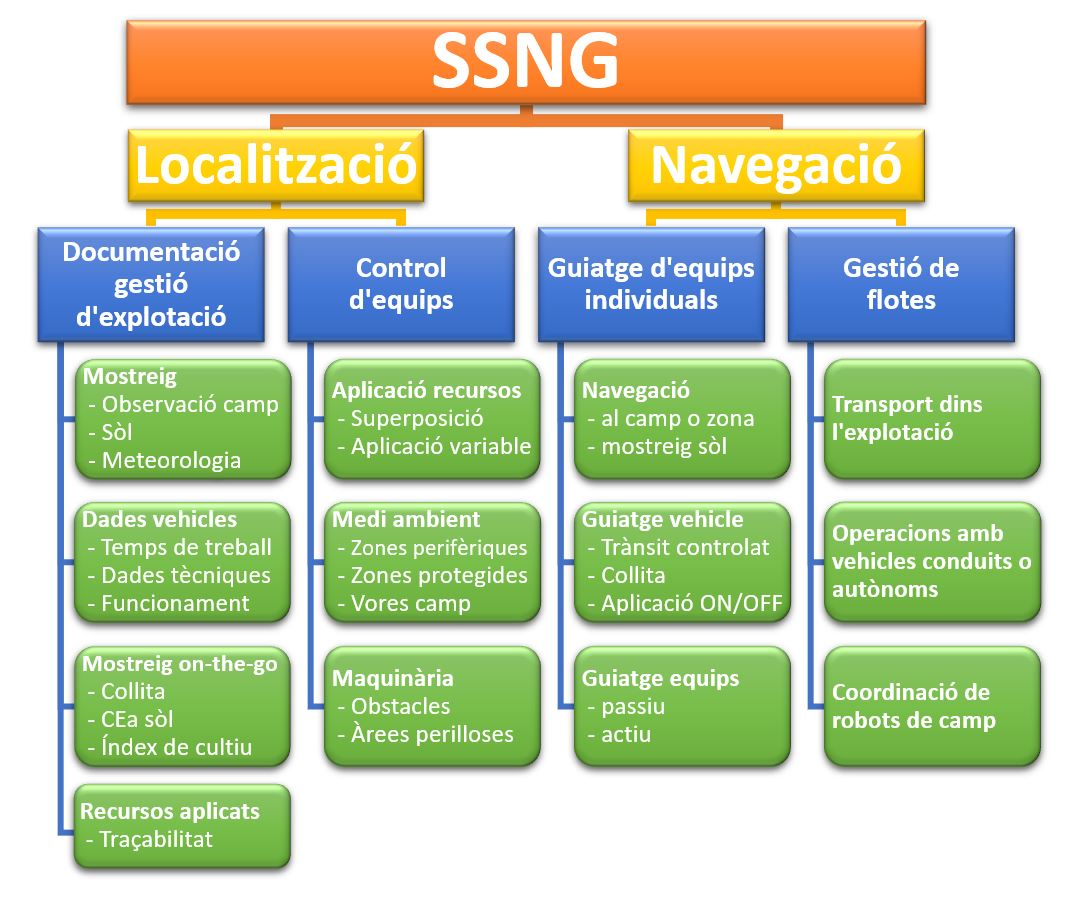
Figura 1. Aplicacions dels Sistemes Satel·litaris de Navegació Global a l’Agricultura de Precisió (Adaptada d’Auernhammer, 2001. DOI: 10.1016/S0168-1699(00)00153-8).
I què són els Sistemes Satel·litaris de Navegació Global? Doncs com bé indica el seu nom, els SSNG són sistemes compostos de diversos subsistemes basats en satèl·lits per a poder navegar per tot el planeta Terra. El més conegut d’aquests sistemes és el Global Positioning System o GPS. Tanmateix, el GPS no és l’únic SSNG sinó que n’hi ha 3 més: el GLONASS rus, el GALILEO europeu i el BEIDOU xinès (Figura 2). Tots els SSNG estan formats per 3 subsistemes o segments: el segment espacial (que inclou tots els satèl·lits), el segment de control (que inclou tots els elements i centres terrestres que en garanteixien el seu correcte funcionament) i, finalment, el segment d’usuaris (que inclou les persones i els equips que determinen les coordenades, és a dir, els receptors).
Figura 2. Reproducció d’un satèl·lit del Sistema Satel·litari de Navegació Global GALILEO (Font: ©EUSPA, ©European Agency for the Space Programme).
El receptors són aquells dispositius que fem anar per a determinar les coordenades a partir dels senyals que emeten els satèl·lits. Actualment, els receptors professionals utilitzats en agricultura són compatibles amb diversos SSNG o amb tots ells i, per tant, anomenar-los simplement GPS no és del tot correcte. El terme genèric adequat per a referir-se a un d’aquests aparells que calcula coordenades és receptor SSNG o receptor GNSS. A la Figura 3 es poden veure diferents receptors.


Figura 3. Esquerra: imatge de catàleg del primer receptor GPS comercial (revista GPS World). Centre: receptor GNSS per a Agricultura de Precisió i pantalla de visualització (Trimble). Dreta: receptor miniaturitzat per a incorporar en dispositius o elements diversos (U-blox).
La trilateració
Per tal que un receptor SSNG pugui calcular les coordenades d’allà on es troba és necessari que rebi els senyals de ràdio emesos per, com a mínim 4, satèl·lits compatibles (d’una o diverses constel·lacions, segons la seva compatibilitat). Aquests senyals de ràdio li permetran saber exactament on estan situats aquests satèl·lits i també li permetran estimar a quina distància es troben del receptor. Amb aquestes dades, el receptor aplicarà un procés anomenat trilateració que li permetrà calcular les seves coordenades.
Tanmateix, l’estimació de la distància entre els diferents satèl·lits i el receptor està subjecta a diversos errors que faran que les coordenades siguin més o menys exactes i precises. Cal tenir ben present que les coordenades obtingudes per trilateració, sense cap ajuda o correcció externa, poden tenir errors que oscil·len entre pocs metres i més de 10 m. Per a algunes aplicacions com la localització de parcel·les, una exactitud de 10 m pot ser perfectament suficient però amb aquest error és impossible fer un guiatge automàtic d’un tractor. És per aquest motiu que moltes vegades caldrà corregir les coordenades per tal d’augmentar-ne la seva exactitud.
Sistemes de correcció de coordenades
El principi bàsic de la correcció de coordenades és el que s’anomena correcció diferencial. Aquest principi es basa en utilitzar dos receptors diferents. Un d’ells, anomenat rover, és el que es desplaça pel camp i del quan volem conèixer la seva posició. L’altre, anomenat base, està estacionat sobre un punt de coordenades conegudes, fet que li permet conèixer, per diferència, l’error comès en la trilateració. Una vegada determinat aquest error, es comunica al rover per tal que corregeixi les seves coordenades obtingudes per trilateració i millorin la seva exactitud.
Aquest principi es pot portar a la pràctica de diverses maneres. Una possibilitat és que un mateix usuari disposi del seu propi rover (probablement embarcat al tractor), de la seva pròpia base i d’un punt de coordenades conegudes en la seva explotació on estacionar-la. En aquest cas, la base es comunica amb el rover per mitjà d’un enllaç de ràdio. Aquest sistema s’anomena GNSS-RTK perquè es fa servir un receptor GNSS i la correcció és del tipus Real-Time Kinematics o bé en moviment i en temps real. Si bé aquesta solució és la més cara de totes perquè l’usuari ha de comprar dos receptors, també és la més exacta de totes, podent arribar a obtenir coordenades amb errors de pocs centímetres.
Una alternativa al sistema GNSS-RTK és que no disposi d’una base sinó que es comuniqui amb una base d’un servei aliè, que pot ser públic o privat. Aquesta connexió es pot realitzar amb una base que estigui propera al rover de l’usuari, tot procurant que no estigui a més de 40 km de distància. En cas que no sigui possible, també hi ha l’opció que el receptor de l’usuari es connecti a un servei que disposi d’una xarxa d’estacions base que li subministri una correcció que tingui en compte diverses de les estacions bases més properes per a pal·liar la pèrdua d’exactitud provocada per la distància. En aquest cas, la comunicació entre receptor i servei ha de ser bidireccional per tal que el servei sàpiga aproximadament on és el receptor i pugui generar una correcció personalitzada a partir de les estacions més properes. Finalment, també hi ha l’opció de connectar-se a un servei que generi correccions per a tot un territori, independentment de la posició del receptor de l’usuari.
Parlarem de correccions terrestres quan el sistema de comunicacions utilitzat entre el receptor i la xarxa d’estacions base sigui un sistema de comunicacions terrestre (via ràdio terrestres o via dades de telefonia mòbil). En anglès, aquests sistemes de correcció s’anomenen Ground-Based Augmentation Systems o GBAS. Parlarem de correccions satel·litàries quan les correccions s’emetin des de satèl·lits. En anglès, aquests sistemes de correcció s’anomenen Satellite-Based Augmentation Systems o SBAS.
Exactitud de les correccions
Degut als errors en l’estimació de les distàncies entre satèl·lits i receptors, dos coordenades d’un mateix punt obtingudes amb pocs minuts de diferència seran més semblants entre elles que si el temps entre una mesura i una altra és més gran (dies, setmanes, mesos o anys). Això passa amb tots els receptors i amb tots els sistemes de correcció, tot i que el sistema GNSS-RTK és molt menys sensible a aquestes diferències. Anomenarem exactitud relativa a l’exactitud de les coordenades obtinguda en intervals petits de temps. Per contra, es parla d’exactitud absoluta quan s’analitza l’exactitud d’unes coordenades o d’un receptor a llarg termini.
Amb els sistemes de correcció terrestres es poden assolir exactituds absolutes centimètriques (encara que menors que amb un sistema GNSS-RTK), decimètriques i submètriques. Amb els sistemes de correcció satel·litaris habitualment es poden aconseguir exactituds submètriques encara que també hi ha serveis amb els que es poden arribar a exactituds decimètriques i, en algun cas, centimètriques.
Tipus de coordenades
Les coordenades d’un punt poden ser relatives o absolutes. Les coordenades relatives indiquen la posició de punts de manera relativa a un altre punt que actua com a origen de coordenades i que és un punt totalment arbitrari. En canvi, les coordenades absolutes fan servir un sistema de coordenades de referència acceptat a nivell global que permet situar un punt de manera inequívoca sobre la superfície terrestre.
En AP hi ha dos maneres d’expressar les coordenades absolutes: mitjançant coordenades geogràfiques i mitjançant coordenades projectades.
Les coordenades geogràfiques indiquen la posició d’un punt sobre la terra a partir de dos angles i, opcionalment, una altitud. Un dels angles, la longitud, indica la posició del punt respecte d’un meridià de referència, com pot ser el meridià de Greenwich. L’altre angle, la latitud, indica la posició del punt respecte de l’equador. L’altitud del punt es comentarà en una secció més endavant.
Les unitats utilitzades en les coordenades geogràfiques són les unitats d’angles del sistema internacional d'unitats: els graus (º), els minuts (') i els segons ("). Així, les coordenades geogràfiques de l'Escola Tècnica Superior d'Enginyeria Agrària de la Universitat de Lleida es poden expressar de les següents tres maneres, totes elles indicant el mateix punt:
Longitud: 0,597118º Latitud: 41,628577º ETRSS89
Longitud: 0º 35,82708' Latitud: 41º 37,71462' ETRSS89
Longitud: 0º 35' 49,6248" Latitud: 41º 37' 42,8772" ETRSS89
Com es pot apreciar, a més de la longitud i la latitud, és imprescindible indicar el sistema de coordenades de referència. En aquest cas l’ETRS89.
MOLT IMPORTANT:
- En coordenades geogràfiques expressades en graus (gg.ggggggggg), amb 6 decimals de grau es pot arribar a una exactitud d’1 m. Si es vol arribar a 1 mm, calen 9 decimals.
- En coordenades geogràfiques expressades en graus, minuts i segons (gg mm ss.sssss), amb 2 decimals de segon s’arriba a una exactitud d’1 m. Si es vol arribar a 1 mm són necessaris 5 decimals.
Les coordenades projectades o cartesianes indiquen la posició d’un punt sobre una projecció plana de la superfície terrestre mitjançant les coordenades X, Y i, opcionalment, Z, totes elles expressades en metres. En AP, la projecció més habitual és la UTM (Universal Transverse Mercator). Aquesta projecció requereix dividir la superfície terrestre en una quadrícula de 24 files (anomenades amb les lletres de la A a la Z) i 60 columnes, numerades de l’1 al 60 (Figura 4). Catalunya, per exemple, es troba a la zona 31T i això cal referir-ho quan se citin les coordenades, a més a més de les unitats de les coordenades i el sistema de coordenades de referència utilitzat. De manera general, la coordenada X varia entre 250.000 m i 750.000 m en cadascuna de les zones. La coordenada Y és la distància del punt a l'equador, en l'hemisferi nord, o bé la distància al pol sud, a l'hemisferi sud. Així, les coordenades projectades UTM inclouran, com a mínim, les coordenades X i Y del punt i també la zona de la quadrícula UTM on es troben les coordenades i el sistema de coordenades de referència. En el cas de l'Escola Tècnica Superior d'Enginyeria Agrària de la Universitat de Lleida, la zona és la 31T i les coordenades cal expressar-les de la següent manera:
X = 299 839 m Y = 4 611 328 m UTM 31T ETRSS89
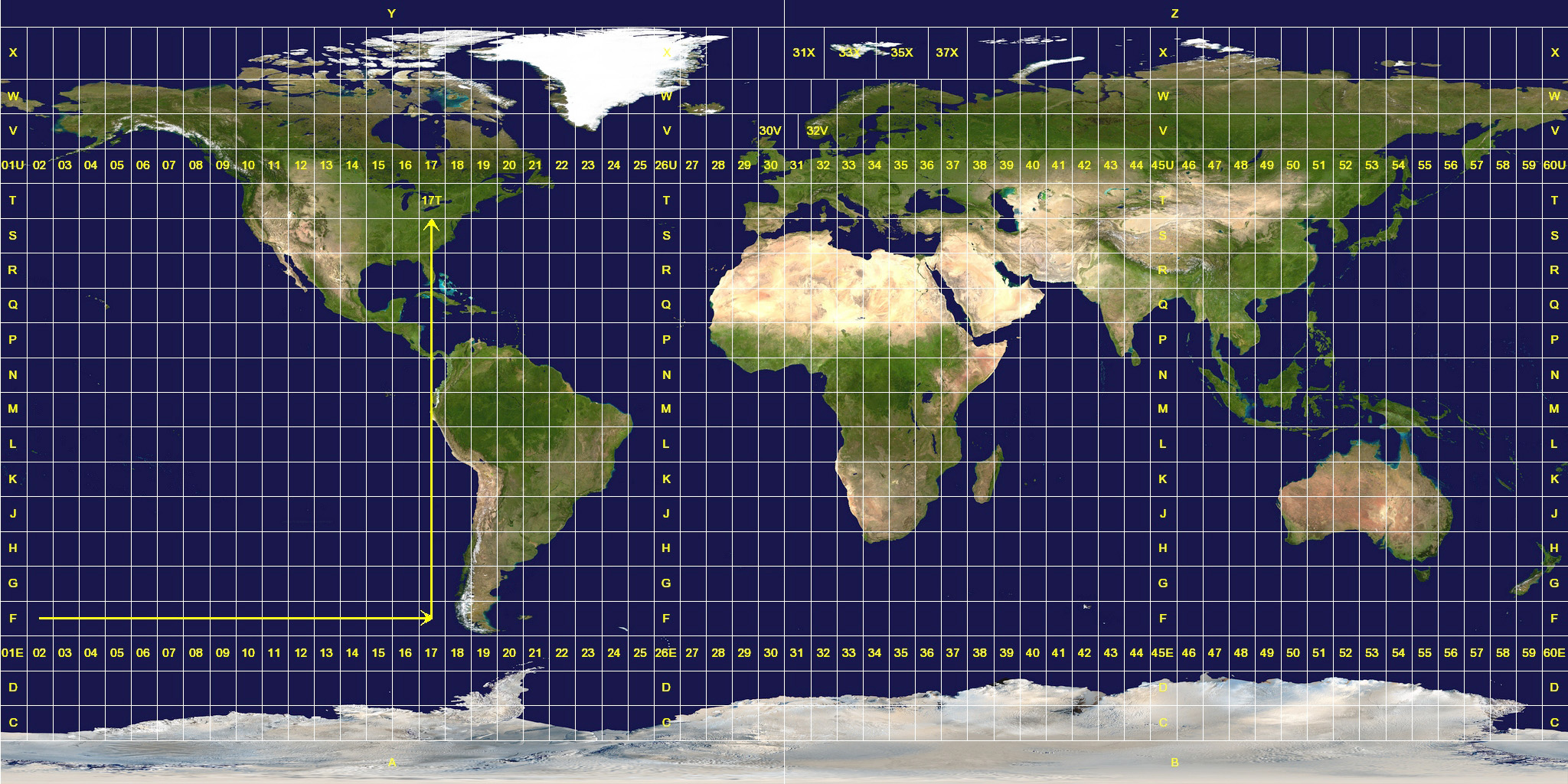
Figura 4. Quadrícula UTM. Autoria: Domini públic, https://commons.wikimedia.org/w/index.php?curid=1601744
Sistema de coordenades de referència i dàtum
Com s’ha dit anteriorment, les coordenades sempre han d'anar acompanyades del sistema de coordenades de referència utilitzat o el seu dàtum per tal de induir a error. A Catalunya i a Espanya, regulat per Reial Decret, i a tot Europa, el dàtum oficial és l'ETRS89 (European Terrestial Reference System 1989). Però, anteriorment, es feia servir l'European Datum 1950 o ED50 un sistema de referència totalment diferent. Tant és així, que les mateixes coordenades expressades en ETRS89 i en ED50 poden diferir en alguns centenars de metres! És molt important tenir això en compte quan es fan servir coordenades antigues. En un tutorial del repositori s’explica com transformar coordenades expressades en diferents dàtums o sistemes de referència.
També cal tenir en compte que el sistema nordamericà GPS i la resta de SSNG fan anar un altre sistema de coordenades de referència, el WGS84 (World Geodetic System 1984). En aquest cas, les mateixes coordenades expressades en ETRS89 i en WGS84 difereixen només en alguns centímetres o decímetres.
En els Sistemes d'Informació Geogràfica (SIG), la manera més habitual d'indicar el tipus de coordenades i el seu dàtum és amb el codi EPSG, ideat per l'European Petroleum Survey Group. Així, el codi EPSG 25831 indica que les coordenades utilitzades són projectades i estan situades a la zona 31T. En canvi, el codi 4326 indica coordenades geogràfiques (latitud i longitud) i dàtum WGS84, el que empra el sistema satel·litari de navegació global GPS.
Altituds
L’altitud de les coordenades obtingudes amb els receptors SSNG fa referència a l’el·lipsoide de referència indicat en el sistema de coordenades de referència o dàtum (ETRS89 o WGS84). Si es desitja obtenir l’altitud respecte del nivell del mar cal que el receptor tingui la capacitat de poder carregar un geoide o bé l’usuari haurà de fer el càlcul fora del receptor. Un geoide és una superfície matemàtica que uneix el nivell mitjà de mars i oceans de tot el món per tal de poder referir l’altitud dels punts al nivell del mar. Les altituds calculades en base a un el·lipsoide de referència s’anomenen altituds el·lipsoidals (h) i les altituds referides a un geoide s’anomenen altituds ortomètriques (H). La relació entre ambdues és la següent:
H = h - N
On N és el que s’anomena ondulació del geoide o bé la diferència entre l’el·lipsoide i el geoide en aquelles coordenades.
Per tal de no cometre errors en altimetria, és important conèixer i configurar correctament els receptors SSNG per tal d’obtenir altituds ortomètriques.
Necessitats d’exactitud en operacions agrícoles
En el moment de decidir la compra d’un receptor SSNG cal tenir ben present quina és l’exactitud necessària o, el que és el mateix, quin és l’error admissible en la determinació de les coordenades. Aquesta exactitud ve determinada per les operacions que es realitzaran. A la Taula 1 s’indica quin és l’error admissible recomanat per a diferents operacions agrícoles.
Taula 1. Error admissible recomanat per a diferents operacions agrícoles.
|
Operació |
Error admissible |
|
Identificació de parcel·les |
±20 m |
|
Identificació de zones dins les parcel·les Mostreig del sòl i Mapes de collita |
±1 m |
|
Treball del sòl general Polvorització i Fertilització uniformes |
±30 cm |
|
Polvorització i fertilització de precisió Sembra / Sega |
±10 cm |
|
Guiatge de tractors Preparació de llits de sembra |
±5 cm |
|
Sembra/Trasplantament de precisió Guiatge d’eines inter i intra línia de cultiu |
<2 cm |
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Rendibilitat de l'Agricultura de Precisió
En agricultura convencional, les actuacions uniformes al camp i l’aplicació de recursos amb dosis úniques comporten costos uniformes per unitat de superfície tant de la maquinària com dels productes emprats. Des del moment en que el coneixement i la tecnologia permeten actuacions variables en Agricultura de Precisió, els costos derivats per hectàrea també esdevindran variables. No és el mateix aplicar 50 kg/ha de fertilitzant que 150 kg/ha. No és el mateix fer servir 250 L/ha de volum d’aplicació unitari en la distribució d’un producte fitosanitari que aplicar 500 L/ha. No és el mateix sembrar 85.000 llavors de panís per hectàrea que 100.000. A més, el fet de distribuir quantitats diferents de recursos per hectàrea també modifica les capacitats de treball dels equips i els seus rendiments i eficiències.
També cal tenir en compte que en Agricultura de Precisió també és possible obtenir mesures per a generar mapes del rendiment del cultiu o de collita, de manera que es pot conèixer la productivitat de cada zona del camp. En agricultura convencional, la producció d’un camp s’obté dividint la producció total per la superfície del camp, és a dir, que el que s’obté és una productivitat mitjana. Amb aquesta productivitat es poden estimar quins seran els ingressos per cada camp. En agricultura convencional es tindran el ingressos mitjans de tot el camp i, igual que en el cas dels costos, aquests ingressos seran constants per unitat de superfície. Tanmateix, en AP, els ingressos dins d’un mateix camp seran variables donat que es disposa de tecnologia suficient per a augmentar la resolució de les mesures de productivitat i passar d’un valor mitjà per a tot el camp en agricultura convencional a centenars o milers de valors cadascun amb les seves coordenades en AP.
El fet de disposar de mapes de productivitat permet generar mapes d’ingressos, a partir de les previsions dels preus de collita. I donat que, tal com s’ha dit abans, també es pot disposar de mapes de costos variables, amb algunes senzilles operacions de sumes i restes píxel a píxel en un Sistema d’Informació Geogràfic es pot obtenir un mapa de benefici d’un camp. Tal és el cas de la Figura 1. En aquesta figura s’observa un mapa de la conductivitat elèctrica aparent del sòl (Figura 1A) i un mapa de l’índex NDVI del cultiu (Figura 1B) d’una parcel·la. A partir d’aquests dos mapes es va generar una zonificació i una prescripció de fertilització variable amb un cost associat a cada zona, segons la dosi de fertilitzant a aplicar (Figura 1C). A la Figura 1D es pot observar un mapa de la productivitat del camp fet amb una recol·lectora equipada amb un monitor de collita. Aquest mapa es pot convertir en un mapa d’ingressos amb el preu que es pugui aconseguir per quilogram o per tona de cultiu. Finalment, a aquest mapa d’ingressos variables se li pot restar el mapa de costos variables i s’obté el mapa de benefici per a aquell camp (Figura 1E).
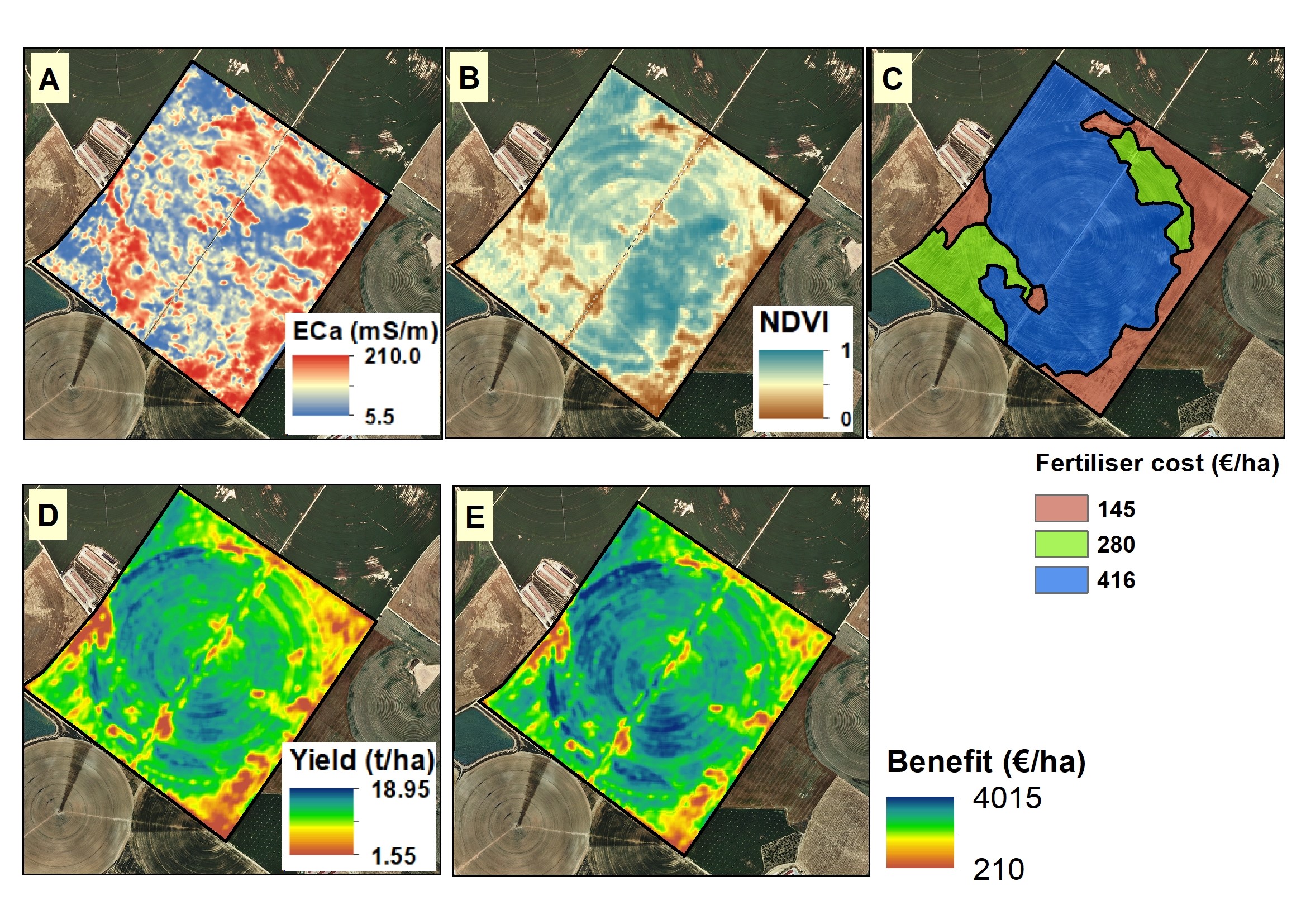
Figura 1. Mapes de conductivitat elèctrica aparent (A), de l’índex NDVI (B), de costos de fertilització per zones (C), de productivitat o collita (D) i de benefici (E) d’un parcel·la sembrada amb ordi.
En un mapa de benefici variable es poden observar zones més rendibles i zones menys rendibles. Fins i tot, es podria donar el cas que hi hagués zones en les que no sortiria a compte realitzar-hi cap actuació perquè la producció aconseguida les faria deficitàries. Aquesta informació tan valuosa per a una explotació serà el punt de partida de les actuacions a realitzar la següent temporada que, a més dels aspectes purament agronòmics, també caldrà que consideri els econòmics. En cultius extensius és relativament senzill aconseguir mapes de productivitat o collita. Tanmateix, en cultius llenyosos actualment és possible obtenir-los en vinya i en ametllers i olivers superintensiu, ja que és relativament senzill instal·lar monitors de collita en els equips de recol·lecció. En la resta de cultius, aconseguir un mapa de collita més o menys automàtic és encara lluny. Confiem en que la recol·lecció robotitzada ens faciliti la feina.
Però quant costa fer Agricultura de Precisió? La resposta no és fàcil. Com a primera idea, el cost podria variar entre 3 €/ha i 15 €/ha per a solucions d'AP molt senzilles i arribar als 40 €/ha per a solucions més avançades. Aquestes dades s'han extret d'exemples australians i s'han de revisar per a cada cas particular. Actualment, no hi ha massa casos d’estudi a Catalunya i seria convenient disposar de tota una col·lecció per a poder valorar millor la conveniència d’adoptar estratègies d’AP. La qüestió clau és analitzar si val la pena adoptar l'AP tenint en compte la visió més àmplia d'economia de l’explotació sencera. Per a abordar aquest problema, començar per un equilibri econòmic entre costos i beneficis és una manera senzilla d'obtenir informació i donar suport a la presa de decisions. Tanmateix, a banda de consideracions estrictament financeres, hi ha altres aspectes que, sent més difícils de valorar a llarg termini, també són molt importants per a la sostenibilitat de les explotacions. Ens referim als impactes positius de l'AP en el medi ambient, en la logística operativa de l’explotació i, fins i tot, en posar en valor social el treball dels agricultors. Per tant, a més dels beneficis econòmics en el compte del balanç, s'han de tenir en compte altres qüestions rellevants abans de decidir si s'ha de fer AP o no. Tanmateix, una anàlisi tan completa és difícil de realitzar perquè no és tan fàcil assignar un valor econòmic als avantatges i impactes esmentats anteriorment. Per posar un exemple, com s'han de quantificar les reduccions de la contaminació per fitosanitaris mitjançant la utilització de polvoritzadors de precisió? O quin valor econòmic s'hauria d'assignar al guiatge automàtic i a la seva influència en la reducció de la fatiga del conductor i la reducció de zones no tractes o sobredosificades per tal d'aconseguir operacions de camp de més qualitat?
En AP hi ha diferents nivells de tecnologia i diferents estratègies i els agricultors han d'optar per aquelles tecnologies que millor s'adaptin a les seves explotacions. Les aplicacions d’AP que poden funcionar en una explotació específica poden no ser les més adequades per a una altra. Tampoc és convenient adquirir el paquet sencer de solucions d’AP sense tenir experiència prèvia. Cal definir quins són els itineraris d’adopció més adients a cada sistema agrícola, tenint en compte els cultius, les dimensions de les explotacions, l’actitud de l’agricultor, etc. Sortir de dubtes començant amb una anàlisi econòmica és el primer que vol l'agricultor i, per aquest motiu, avaluar els resultats de la inversió en AP mitjançant un balanç financer sovint és una bona opció per començar.
Quan es planteja l'oportunitat d'adoptar l'AP, l'anàlisi econòmica s'ha de centrar primer en les possibles reduccions dels recursos a distribuir (adobs, productes fitosanitaris, llavors, reg) derivades de l'ús de tecnologies d'AP. És a dir, els costos d'inversió addicionals en AP s'han de compensar amb majors beneficis derivats de la reducció dels recursos necessaris i els seus costos d'aplicació. Quan no és possible una reducció d’aquests recursos a causa de la redistribució al camp, cal esperar un augment de la producció i/o de la seva qualitat. Per tenir en compte tot això en termes econòmics, un enfocament de balanç proporciona un mètode fiable per avaluar els resultats de la inversió en AP. De fet, els agricultors només necessiten estimar de manera fiable quins són els costos i els beneficis. Tot i que hi ha moltes operacions d'AP que poden comportar beneficis econòmics, dues àrees estan cridant més l'atenció dels agricultors. En primer lloc, molts agricultors estan adoptant amb èxit ajudes per a la navegació de vehicles (direcció automàtica i guia) basades en sistemes globals de navegació per satèl·lit (GNSS), conscients que la reducció d'inputs requereix fer aplicacions de camp (fins i tot taxes de dosi uniformes per a tota la parcel·la) de la manera més eficient possible. El tràfic de vehicles és tan precís mitjançant l'ús d'aquests sistemes de navegació que permeten obtenir estalvis d'inputs reduint zones superposades o doblement tractades. Així mateix, s'eviten les zones no tractades (contribuint a millorar el rendiment i reduir el consum de combustible per tractaments addicionals), i també es registra i georeferencia la traçabilitat per a posteriors decisions de gestió. En segon lloc, els agricultors haurien de valorar invertir en aquests sistemes d'orientació i altres tecnologies d'aplicació de taxa variable (VRT) per gestionar la variabilitat dels cultius a les seves parcel·les o finques. En aquest cas, el maneig específic localitzat de cultius (en anglès, Site-Specific Crop Management o SSCM) és la forma més eficaç d'optimitzar els inputs i augmentar els ingressos de producció.
Per ajudar en la presa de decisions, en un cas o en un altre, un simple full de càlcul hauria de permetre obtenir el balanç, considerant costos i beneficis per hectàrea. Aleshores, què dificulta l'anàlisi econòmica? Bé, molt senzill. La dificultat rau en quantificar els costos i beneficis que en última instància depenen de la gestió de la variabilitat per a cada explotació concreta. Per tenir una idea econòmica de la seva magnitud, la Taula 1 ofereix els costos estimats dels components i la informació necessària per a les tecnologies d’AP (preus de 2018). Els preus són variables segons l'equip i el tipus de servei, per la qual cosa els agricultors haurien de contactar amb els seus proveïdors de serveis per conèixer preus més ajustats als seus sistemes de producció. Pel que fa als contractes, els preus solen variar segons la superfície (hectàrees) de la finca. A més, els costos d'imatges remotes de drons o avionetes depenen no només de les hectàrees a mesurar sinó també de vegades també del nombre de vols contractats. Segons el tipus de cultiu, la cartografia i la interpretació d'imatges remotes pot suposar un cost addicional de 5 a 10 €/ha en fructicultura en comparació amb els cultius extensius.
Taula 1. Costos estimats per a l’adquisició de tecnologies i serveis d’Agricultura de Precisió (estudi realitzat l’any 2018).
|
Tecnologia o servei |
Cost |
Vida útil (anys) |
|
Ajudes al guiatge d’equips |
|
|
|
Assistència al guiatge |
5.750 a 8.250 € |
7 |
|
Guiatge automatitzat |
9.050 a 15.000 € |
7 |
|
Detecció propera |
|
|
|
Monitor de collita (cereals) |
12.200 € |
7 |
|
Productivitat (cereal): servei de recol·lecció + mapat |
70 a 80 + 5 €/ha |
1 |
|
Sensors propers de cultiu o males herbes (una unitat) |
4.050 € |
7 |
|
Mostreig conductivitat elèctrica aparent del sòl (servei) |
12,1 a 14,5 €/ha |
3 |
|
Mostreig i anàlisi de mostres de sòl convencionals |
52 €/mostra |
3 |
|
Teledetecció |
|
|
|
Imatgeria satel·litària (resolució 3 m/píxel) |
2,4 a 6 €/ha/any* |
1 |
|
Imatgeria des d’avioneta tripulada |
5 a 10 €/ha/vol |
1 |
|
Imatgeria des de dron o UAV |
20 €/ha/vol |
1 |
|
Tecnologies d’aplicació variable (VRT) |
|
|
|
Sembra: servei de sembra variable |
45 + 10 €/ha |
1 |
|
Sembra directa: servei de sembra variable |
55 + 10 €/ha |
|
|
Fertilització: servei fertilització variable |
10 a 13 €/ha** |
1 |
|
Aplicació variable de fitosanitaris |
10 a 13 €/ha** |
1 |
|
Consultoria AP |
|
|
|
Servei de consultoria per a tota la temporada |
10 a 35 €/ha |
1 |
* 2,4 €/ha/any per a agricultors amb més de 5000 ha.
** No inclou el cost del servei de consultoria per a preparar el mapa de prescripció.
En resum, són possibles diversos enfocaments per començar a implementar l’AP a nivell comercial d'una manera rendible. Tots ells requereixen una important inversió inicial ja sigui en equipament, serveis de consultoria, formació o temps. Un agricultor pot optar per una AP dura (Hard PA) o una AP suau (Soft AP) o pot optar per desenvolupar les seves pròpies solucions adaptades o utilitzar els equips convencionals disponibles. Una altra cosa a considerar és si s'utilitza l'AP basada en mapes o bé l’AP en temps real.
Com en qualsevol altre cas, les decisions s'han de prendre després d'entendre què hi ha darrere de cadascuna de les possibles alternatives. D'una banda, l'AP dura juntament amb l’adopció de solucions en temps real basades en sensors sol requerir menys formació per part dels agricultors però un major capital inicial. També és important comprovar que les decisions que s’adoptaran de forma automàtica i sense validació siguin les adequades per a aquell cas concret. D'altra banda, l'AP suau basada en mapes requerirà més coneixement i formació i/o més assessorament per a adaptar les solucions a l’explotació. Igualment, no podem descartar l’adopció de l’AP en explotacions petites sense haver analitzat la seva possible rendibilitat. Tampoc podem assegurar que l’AP sigui rendible en explotacions grans. Tot dependrà de la seva variabilitat i de tots els aspectes econòmics esmentats anteriorment.
Tanmateix, siguin quines siguin les solucions adoptades, és crucial assegurar-se que siguin factibles, fiables i rendibles. Una bona manera d'avaluar-ho és utilitzant tècniques d'experimentació a l’explotació (en anglès, On-Farm Experimentation). Quines són les dosis de fertilitzant més adequades a cadascuna de les zones de gestió delimitades? Quina és la densitat de llavor òptima? Quina és la millor dosi de producte fitosanitari o herbicida? Quan i quant cal regar? Són preguntes per respondre que afecten en gran mesura els resultats de la temporada. Les tècniques d'experimentació a l’explotació, juntament amb les solucions de monitoratge de l'AP poden ajudar els agricultors i tècnics a prendre decisions més ben fonamentades. L'objectiu és augmentar la productivitat dels cultius i/o la qualitat del producte obtingut mitjançant un ús més eficient dels recursos per garantir la sostenibilitat de l’explotació alhora que es minimitzen els riscos mediambientals. Així és l'Agricultura de Precisió.
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)