Sensors radiomètrics
La radiometria és la ciència que estudia i mesura la radiació electromagnètica. Per tant, els sensors radiomètrics són aquells sensors que mesuren i quantifiquen la radiació electromagnètica que els arriba. Aquests sensors poden ser actius o passius. Els sensors actius tenen la seva pròpia font d’energia i mesuren la fracció de la radiació emesa reflectida pels objectes que hi hagi al seu voltant. En canvi, els sensors passius no emeten radiació, de manera que la radiació que capten és la reflectida pels objectes a partir d’una font d’energia aliena al sensor. En agricultura, aquesta font d’energia acostuma a ser el sol i els objectes mesurats, les plantes.
Classificació de sensors radiomètrics
Hi ha diferents tipus de sensors radiomètrics segons la naturalesa de la radiació que mesuren. Els més habituals en Agricultura de Precisió són els sensors anomenats multiespectrals, és a dir, aquells que mesuren diverses bandes de l’espectre electromagnètic, normalment fins a unes 15. Quan poden mesurar més bandes, els sensors s’anomenen hiperespectrals i el seu ús és més habitual en l’àmbit de la recerca.
Segons la manera com capturen les dades, els sensors poden realitzar mesures de tipus puntual, matricial i per escombratge. Les mesures puntuals retornen la intensitat de la radiació reflectida en les diferents longituds d’ona a les que el sensor és sensible en una zona de mesura de dimensions reduïdes (alguns centímetres quadrats). Tanmateix, la mesura és un únic valor d’intensitat per cadascuna de les bandes mesurades. En canvi, un sensor de mesura matricial és capaç de mesurar la intensitat de la radiació rebuda en cadascuna de les cel·les d’una matriu de files i columnes. El resultat és un valor de radiació per cada cel·la del sensor i cada cel·la representa una fracció de l’escena mesurada. Aquest és el cas de les imatges RGB de les càmeres digital. El sensor de la càmera mesura les longituds d’ona corresponents als colors vermell, verd i blau en cadascuna de les cel·les que té. El resultat són tres matrius de píxels cadascuna enregistrant la quantitat de llum vermella, verda i blava que ha arribat al sensor. Les tres matrius superposades donen lloc a una imatge plana amb colors RGB. El nombre de files i columnes de cel·les determina la resolució de la imatge. Si en comptes de mesurar només les longituds d’ona corresponents als tres color, el sensor és capaç d’enregistrar altres bandes, a cadascuna de les noves bandes li correspondrà una nova matriu de valors. Finalment, els sensors d’escombratge només tenen una fila o una columna de cel·les i la matriu necessària per a representar l’escena capturada es genera amb el desplaçament del sensor. El cas més habitual són els sensors multiespectrals embarcats en satèl·lits (Figura 1).
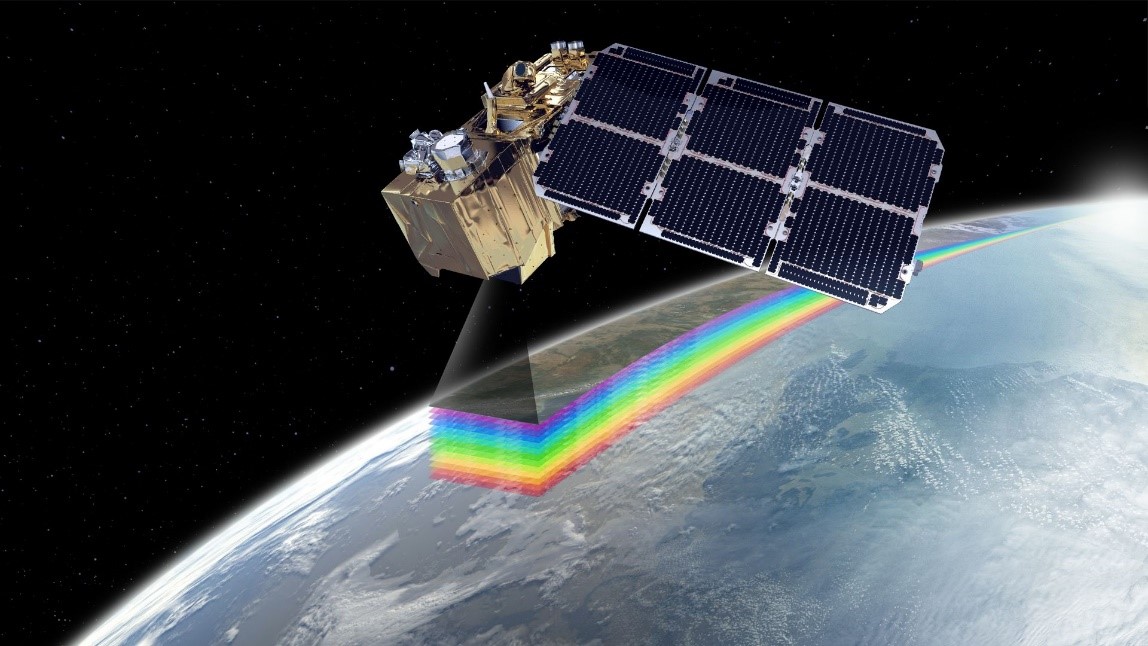
Figura 1. Representació del satèl·lit Sentinel-2 que incorpora un sensor multiespectral d’escombratge de 13 bandes. Font: ESA.
Una altra classificació possible és segons el nombre d’objectius que tingui el sensor. Un sensor monofocal RGB, amb un sol objectiu, habitualment capta les tres longituds d’ona corresponents als colors vermell, verd i blau. Es pot modificar el sensor incorporant filtres a l’objectiu per a captar altres longituds d’ona (Figura 2 esquerra). Si es desitja captar més bandes, llavors caldrà disposar de més objectius, tal com es mostra a la Figura 2 dreta, on la càmera disposa de 6 objectius, cadascun per a captar una longitud d’ona diferent.


Figura 2. Càmera Mapir Survey 3 monofocal amb 3 longituds d’ona RGNIR (esquerra) i càmera multifocal MicaSense RedEdge-P amb 6 longituds d’ona RGB+NIR+RedEdge+Pancromàtic (dreta).
Aplicacions en Agricultura de Precisió
En Agricultura de Precisió es fan servir aquest tipus de sensors per a obtenir informació sobre els cultius. A partir de la combinació de les diferents longituds d’ona es poden obtenir diversos índex de vegetació que descriguin l’estat dels cultius.
El tipus de sensor i les seves característiques determinen la resolució espacial de les mesures i la seva qualitat. No és el mateix obtenir una mesura puntual que una imatge en la que per cada píxel es pot obtenir un valor de l’índex de vegetació desitjat.
També és molt important la plataforma on s’embarca el sensor. Com més lluny estigui el sensor del cultiu, més afectacions tindrà la radiació que li arribi i més correccions caldrà realitzar per a obtenir mesures fiables. Això és especialment important en el cas dels sensors embarcats en satèl·lits, on la llum reflectida pel cultiu ha de travessar tota l’atmosfera abans d’arribar al sensor.
Documents relacionats


Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Càmeres de profunditat RGB-D
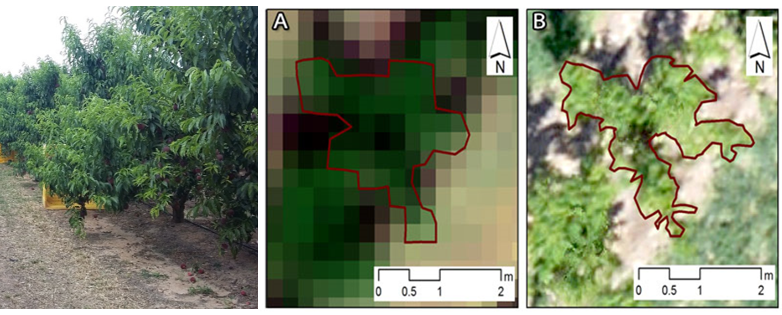
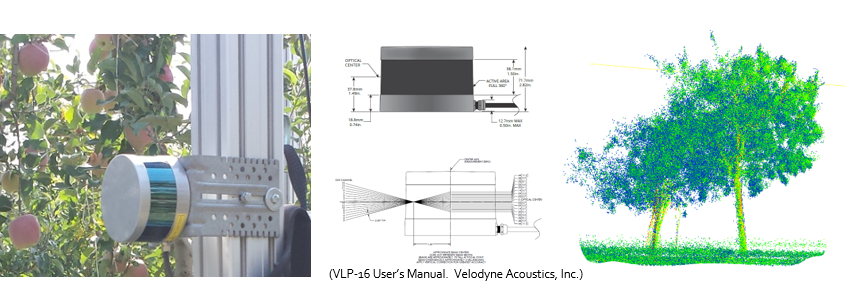
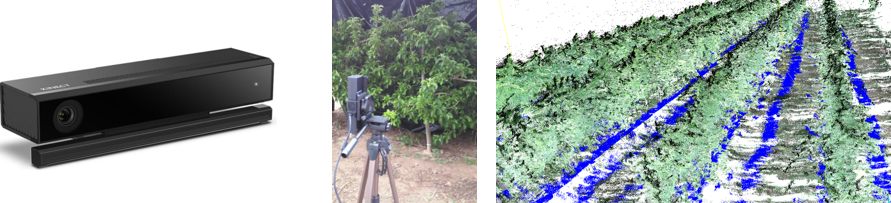
Les càmeres de profunditat són sensors que permeten adquirir imatges on, per cada píxel, es mesura la distància entre la càmera i els objectes (blancs) fotografiats (Figura 1.b), permetent la generació d’imatges 3D (tres dimensions) en format de núvol de punts (Figura 1.c). Algunes càmeres de profunditat també proporcionen dades de color (Figura 1.a). Els dispositius que proporcionen simultàniament una imatge de color i una imatge de profunditat també són anomenats càmeres o sensors RGB-D, on RGB es refereix a la imatge de color (acrònim pels canals de cada color, de “Red, Green and Blue” en anglès) i D es refereix a la imatge de profunditat (“depth” en anglès) que en català es podria anomenar distància.
A continuació es mostra un exemple d’una imatge RGB-D i el corresponent núvol de punts 3D:
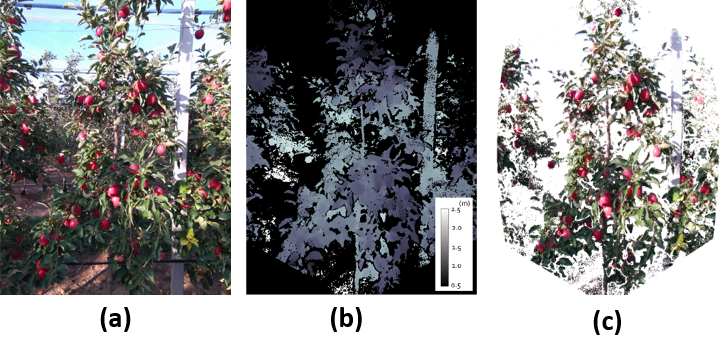
Figura 1. Exemple d’imatge RGB-D adquirida amb el sensor Microsoft Azure Kinect DK en una plantació de pomeres. a) Imatge de color (RGB); b) Imatge de profunditat (D); c) Núvol de punts 3D generat a partir de la imatge de profunditat.
Tipus de càmeres de profunditat
Com es mostra a la Figura 2, segons el principi de funcionament, les càmeres de profunditat es classifiquen en: estereovisió, llum estructurada o temps de vol (ToF, “Time-of-flight” en anglès).
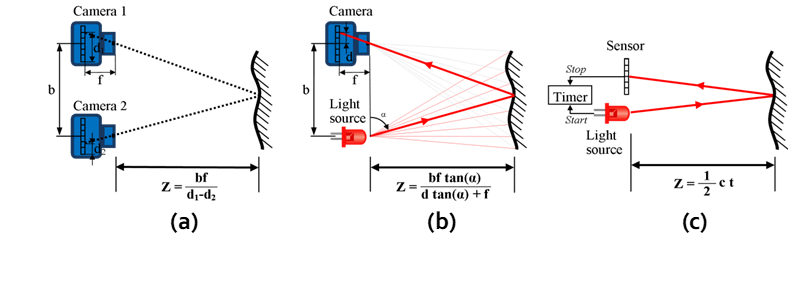
Figura 2. Representació dels principis de funcionament de les càmeres de profunditat basades en: a) estereovisió; b) llum estructurada; i c) temps de vol. (Font: http://hdl.handle.net/10803/669110)
L’estereovisió és una tècnica fotogramètrica inspirada en la visió humana. Els dispositius basats en estereovisió incorporen dos càmeres monofocals i calculen les distàncies fins als blancs mitjançant triangulació entre punts homòlegs en ambdues imatges. Un avantatge d’aquest tipus de sensors és que poden operar en condicions d’il·luminació elevades, permetent el seu ús a l’exterior sota l’efecte de la llum solar. Un exemple de sensor RGB-D basat en estereovisió és la càmera ZED de la firma Stereolabs (Figura 3).

Figura 3. Càmera ZED. Sensor RGB-D basat en el principi de funcionament d’estereovisió. (Font: https://www.stereolabs.com/zed-2/)
El principi de funcionament dels sensors de llum estructurada és similar al de l’estereovisió, però en aquest cas es basa en l’emissió (projecció) d’un patró conegut de llum infraroja (IR) sobre el blanc objecte d’estudi i la posterior captura mitjançant un receptor (càmera) del patró distorsionat per la superfície del blanc. Un inconvenient d’aquests sensors és que les mesures de profunditat es veuen afectades en condicions d’il·luminació elevades, limitant el seu ús en condicions d’interior o en franges horàries amb poca il·luminació solar. Un exemple de sensor RGB-D basat en llum estructurada és el sensor Kinect v1 de Microsoft (Figura 4).

Figura 4. Sensor Kinect v1. Sensor RGB-D basat en el principi de funcionament de llum estructurada. (Font: https://doi.org/10.1016/j.compag.2018.03.003)
Els sensors basats en el principi de temps de vol també incorporen un emissor i un receptor de llum IR. En aquest cas, la distància es calcula a partir del temps requerit pel pols de llum emès en completar la trajectòria d’anada i tornada entre el sensor i el blanc mesurat. Altres sensors de temps de vol emeten ones de llum modulades en amplitud i calculen la distància a partir de la diferència de fase entre l’ona de llum emesa i l’ona rebuda pel receptor (ona que retorna del blanc). El rendiment d’aquests sensors també es veu afectat en condicions d’il·luminació elevades, però aquesta afectació és menor quan es mesuren blancs a prop del sensor, permetent el seu ús en condicions exteriors quan es capturen dades des de distàncies curtes. Un exemple de sensor RGB-D basat en temps de vol (ToF) és el sensor Azure Kinect DK de Microsoft (Figura 5).

Figura 5. Sensor Azure Kinect DK. Sensor RGB-D basat en el principi de funcionament de temps de vol. (Font: https://azure.microsoft.com/es-es/products/kinect-dk)
Aplicacions a l’agricultura de precisió
Les càmeres de profunditat i sensors RGB-D s’han utilitzat per a la caracterització geomètrica de les plantacions, així com per la identificació i mesura d’òrgans vegetatius (fruits, fulles, etc.). Malgrat que els sensors LiDAR s’han emprat més per la caracterització geomètrica gràcies a la seva robustesa en condicions d’il·luminació elevades, els sensors RGB-D tenen l’avantatge de ser més econòmics i proporcionar dades de color. A més, els avenços tecnològics han permès que cada cop siguin menys sensibles a les condicions d’il·luminació.
Les seves principals aplicacions en l’agricultura de precisió són:
- Caracterització geomètrica: monitoratge del creixement i identificació de zones amb problemes de desenvolupament.
- Identificació i mesura d’elements vegetatius: troncs, branques, etc.
- Detecció i mesura automàtica de fruits per l’estimació de collita i mapes de producció.
- Ajust de la dosi de recursos agrícoles a les dimensions del dosser foliar: pesticides, fertilitzants, regs, etc.
- Maneig de la capçada en operacions de poda.
- Identificació de males herbes.
Més info i referències
Gregorio, E., Llorens, J. (2021). Sensing Crop Geometry and Structure. In: Kerry, R., Escolà, A. (eds) Sensing Approaches for Precision Agriculture. Progress in Precision Agriculture. Springer, Cham. https://doi.org/10.1007/978-3-030-78431-7_3
Publicacions científiques del Grup de Recerca en AgròTICa i Agricultura de Precisió: http://www.grap.udl.cat/ca/publications/Publicacions-cientifiques
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional
(CC BY-NC-SA 4.0)
Els Índexs de Vegetació
Què son?
Els índex de vegetació (IV) són ràtios calculats amb la reflectància espectral de la vegetació en diferents bandes de l’espectre electromagnètic mesurades per un sensor (Figura 1). Es fan servir com indicadors de la presència de plantes o arbres i per a conèixer el seu estat general. La relació entre aquestes bandes té al darrere un estudi empíric que demostra la relació directa entre el valor numèric calculat i un determinat paràmetre de la planta a mesurar.
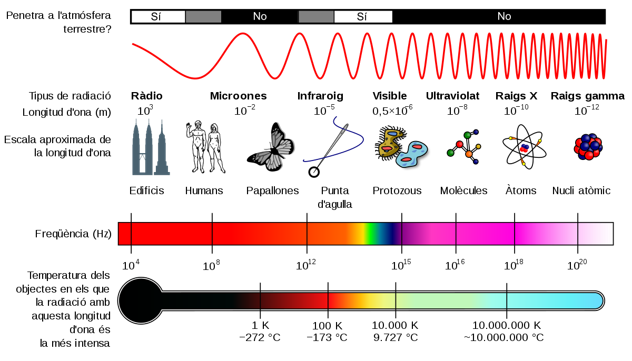
Figura 1. Espectre electromagnètic. (Font: Vikipèdia)
Per a què s’utilitzen?
Aquests índexs aprofiten el particular comportament de la vegetació sana en les diferents bandes espectrals, especialment, entre el visible i l'infraroig proper. En efecte, mentre en el visible, en particular a la banda vermella, els pigments de la fulla absorbeixen la major part de l'energia que reben per a fer la fotosíntesi, l'infraroig proper en ser una radiació més energètica, no es pot fer servir per a sintetitzar molècules orgàniques i és reflexat per la planta per evitar el sobreescalfament (Figura 2). Aquests contrastos són els que aprofiten els IV per establir diferències en la vegetació sana i vigorosa, quan els contrastos són més grans, i vegetació malalta o de baixa densitat, quan els contrastos són reduïts. Diferenciar les zones de vigor dins d’una parcel·la ens permetrà, per exemple, aplicar diferents quantitats d’insums mitjançant mapes de prescripció o dirigir mostrejos per al mostreig del sòl o per estimar la collita.
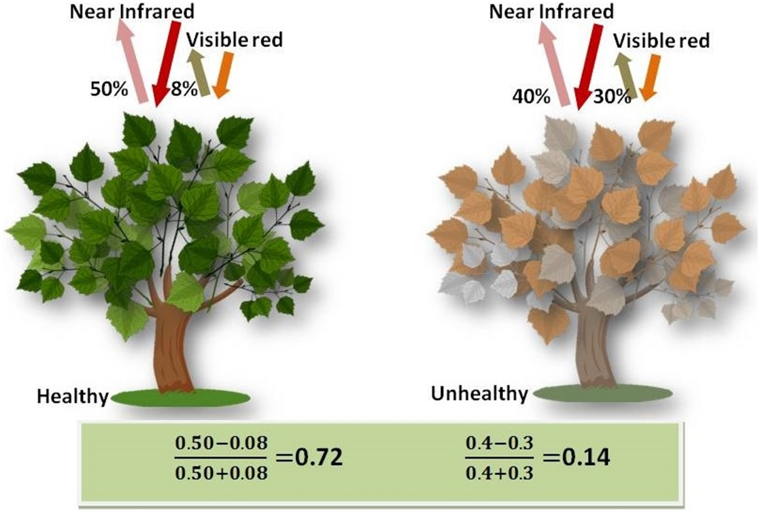
Figura 2. La vegetació verda (esquerra) absorbeix la llum visible i reflecteix la llum infraroja propera; La vegetació escassa (dreta) reflecteix més llum visible i menys llum infraroja propera. (Font: https://doi.org/10.1371/journal.pone.0108548).
Principals índexs espectrals
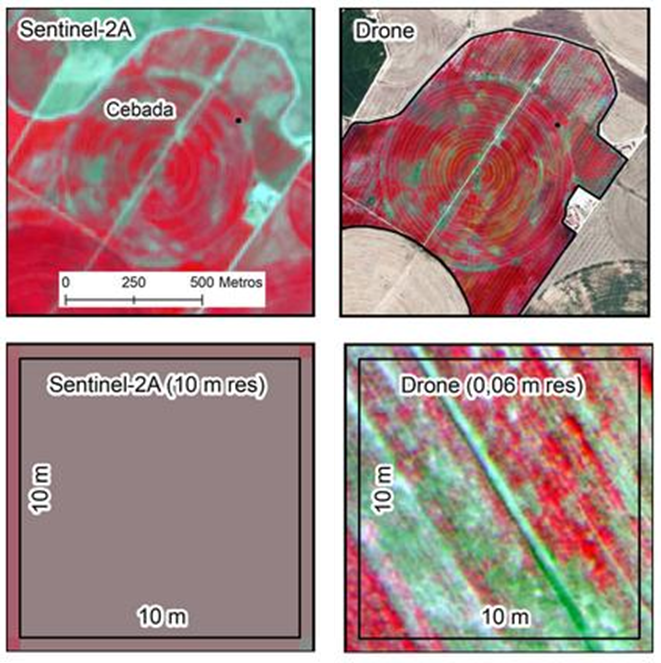
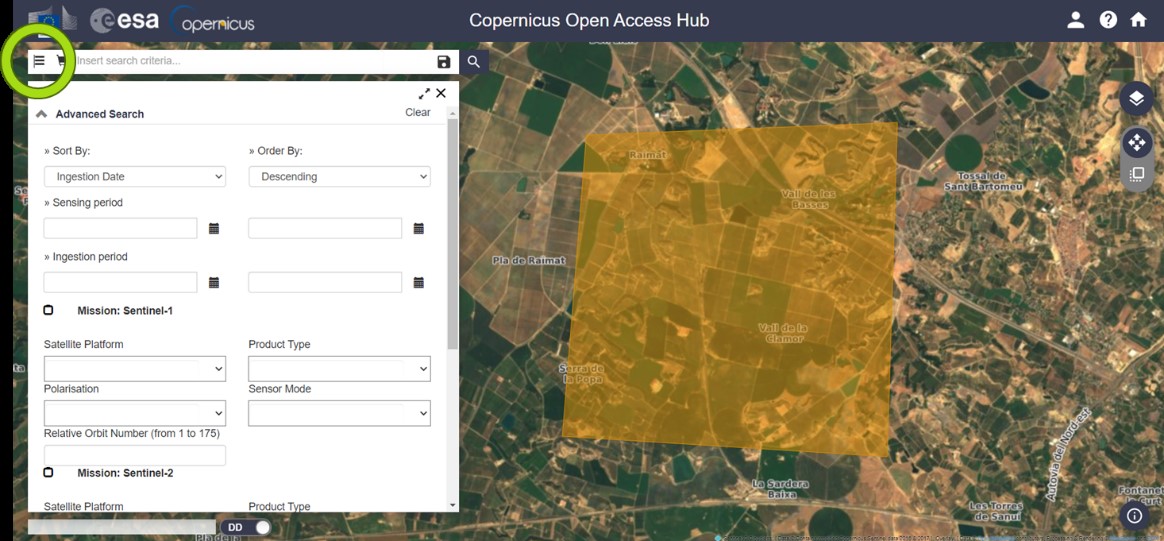
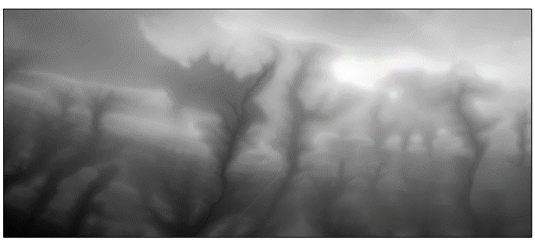
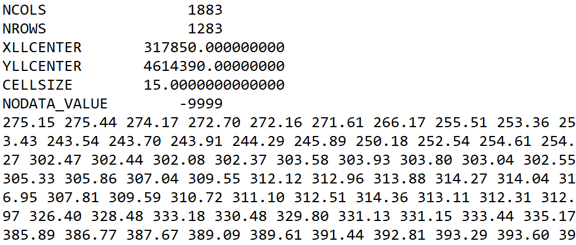
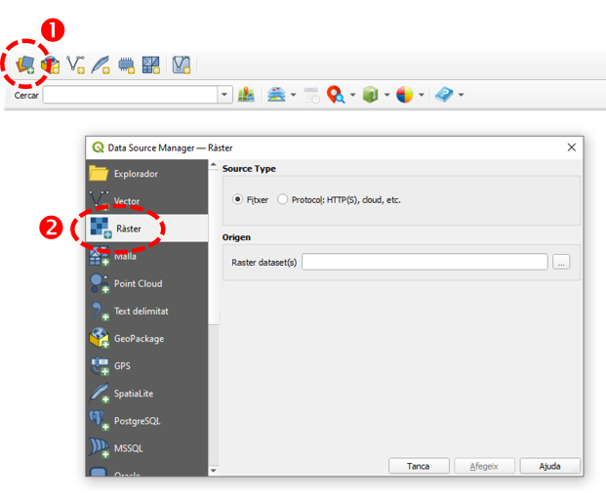
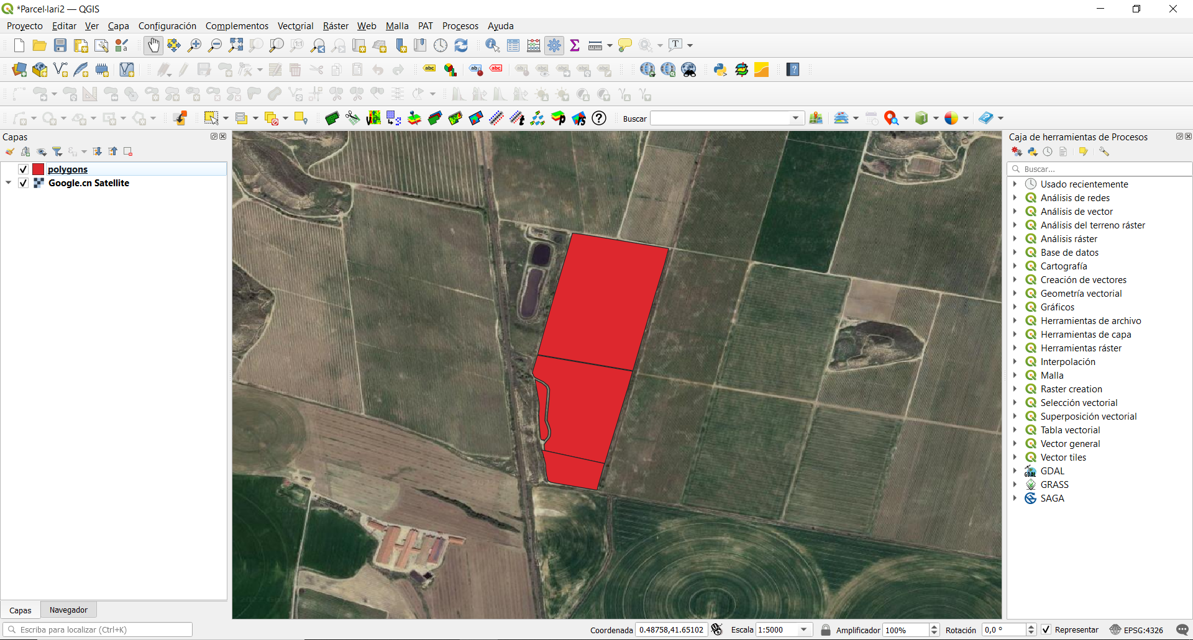
A continuació fem un resum dels índex de vegetació més utilitzats, la seva fórmula matemàtica i la fórmula amb referència a les diferents bandes espectrals proporcionades a les imatges dels satèl·lits Sentinel-2. Les imatges multiespectrals es poden descarregar de manera gratuïta, i t’expliquem com calcular l’NDVI amb el sistema d’informació geogràfica QGIS a mode d’exemple.
Normalized Difference Vegetation Index (NDVI):
L’índex NDVI és l’índex de vegetació de diferència normalitzada i és un dels més utilitzat. Serveix, bàsicament, per a mesurar el desenvolupament de les plantes, determinar la presència de cobertes vegetals i controlar la producció de biomassa. Quan un arbre és vigorós, reflecteix molta radiació solar en l'infraroig proper i poca en el vermell i, en conseqüència, s'obté un NDVI elevat. En canvi, quan un arbre està estressat, passa el contrari. Els valors donats per aquest índex varien entre -1 i 1. L’aigua i el sòl donen valors negatius o positius baixos i la vegetació dona valors més propers a 1 com més sana i vigorosa és. L’NDVI es calcula a partir de la següent equació:
NDVI= (infraroig proper – vermell) / (infraroig proper + vermell)
NDVI (Sentinel-2) = (B8 – B4) / (B8 + B4)
Green Normalized Difference Vegetation Index (GNDVI):
És un índex de "verdor" o activitat fotosintètica de la planta. És un dels índexs de vegetació més utilitzats per determinar l'absorció d'aigua i nitrogen per part del cultiu. Els valors donats per aquest índex varien entre -1 i 1. Es calcula mitjançant la següent equació:
GNDVI = (infraroig proper - verd)/(infraroig proper + verd)
GNDVI (Sentinel-2) = (B08 – B03) / (B08 + B03)
Enhanced Vegetation Index (EVI):
És un índex de vegetació "optimitzat" dissenyat per millorar el senyal de vegetació amb una sensibilitat millorada a les regions d'alta biomassa i un seguiment millorat de la vegetació mitjançant un desacoblament del senyal de fons del dosser i una reducció de les influències atmosfèriques. L'EVI es calcula seguint aquesta equació:
EVI = 2.5*(infraroig proper - roig) / (infraroig proper + 6*roig - 7.5*blau + 1)
EVI (Sentinel-2) = 2.5 * (B8 – B4) / ((B8 + 6 * B4 – 7.5 * B2) + 1))
Advanced Vegetation Index (AVI):
L’índex AVI és similar a l'NDVI donat que utilitza les bandes espectrals vermella i infraroja propera per monitorar les variacions dels cultius i dels boscos al llarg del temps. Amb la combinació multitemporal de l'AVI i l'NDVI és possible discriminar diferents tipus de vegetació i extreure les característiques de la fenologia. L’AVI es calcula amb la següent equació:
AVI = infraroig proper * (1-roig) * (infraroig proper-roig)
AVI (Sentinel-2) = B8 * (1 – B4)*(B8 – B4)
Soil Adjusted Vegetation Index (SAVI)
L’índex SAVI és un IV que intenta minimitzar a influència de la brillantor del sòl utilitzant un factor de correcció (L). Això sovint s'utilitza en regions àrides on la coberta de vegetació és baixa i genera valors entre -1,0 i 1,0. La seva equació és:
SAVI = ((infraroig proper - roig) / (infraroig proper + roig + L)) x (1 + L)
SAVI (Sentinel-2) = (B08 – B04) / (B08 + B04 + L) * (1+L)
Es va trobar un valor L d’aproximadament 0,5 a l'espai de reflectància per minimitzar les variacions de la brillantor del sòl i eliminar la necessitat d'un calibratge addicional per a diferents sòls.
Plant Cell Density (PCD)
En cultius amb més densitat de vegetació el vigor es contrasta millor a través de l'índex PCD que de l'NDVI, probablement a causa de la capacitat més gran del PCD de detectar diferències en la biomassa fotosintètica activa o canvis en l'índex d'àrea foliar. La seva equació és:
PCD = infraroig proper / roig
PCD (Sentinel-2)= B08 / B04
Després els valors es normalitzen en una resolució de 8 bits amb valors entre 0 i 255 (tots dos inclosos). És a dir, per a cada parcel·la i imatge, al valor mínim obtingut amb l'equació 1 se li assigna el valor 0, i al màxim el 255. Els valors intermedis s'interpolen de manera lineal. Per tant, aquest índex és relatiu i els mapes obtinguts en diferents moments i parcel·les no es poden comparar.
+ Índex de vegetació
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Mesura de la conductivitat elèctrica aparent del sòl
La conductivitat elèctrica (CE) és la mesura de la capacitat d'un material per deixar passar el corrent elèctric a través seu. La seva unitat de mesura és S/m (siemens per metre), el siemens és la unitat del Sistema Internacional d'Unitats per a la mesura de la conductància elèctrica. En aquest cas, el material que actua com a conductor és el terra i la CE en mesura la capacitat per conduir el corrent elèctric gràcies a la interacció de diferents propietats.
Les mesures estàndard de la CE es fan en extractes aquosos de mostres de sòl (p.e., en extracte de pasta saturada, o en extracte aquós 1:5). A causa del temps, la mà d'obra i el cost d'obtenir extractes de la solució del sòl, en les darreres dècades, s'han desenvolupat tècniques per a la mesura de la CE del sòl “en brut”, cosa que es coneix com a conductivitat elèctrica aparent del sòl (CEa). Així, la CEa mesura la conductància no només a través de la solució del sòl, sinó també a través de les partícules sòlides del sòl i mitjançant els cations intercanviables que existeixen a la interfície sòlid-líquid dels minerals argilosos (Corwin i Lesch, 2003). Per tant, la conductància elèctrica en sòls suficientment humits es deu, principalment, a les sals contingudes a la solució del sòl que ocupen els porus més grans; en conseqüència, el mesurament de la CEa està estretament relacionat amb la salinitat del sòl. No obstant això, també hi ha una contribució de la fase sòlida, principalment a través dels cations intercanviables associats a les argiles (component textural del sòl) i, a més, a través de les partícules del sòl en contacte directe i continu entre si.
Aquestes relacions entre la CEa i les propietats dels sòls, encara que variables segons els casos, s'han aprofitat fins a convertir-se en un mitjà àmpliament acceptat d'establir la variabilitat espacial de les propietats fisicoquímiques del sòl que influeixen en el seu mesurament. No obstant això, cal saber que, atesa la complexitat de les interaccions entre els diferents components del sòl, no hi ha una correspondència exacta entre la CEa i el contingut de salinitat, la textura o altres propietats del sòl, sinó que en cada cas s'hi haurà de determinar mitjançant mostrejos i anàlisis en laboratori. Tot i això, autors com Lund et al. (1999) han arribat a establir una correspondència aproximada, com la que es mostra a la Figura 3. Les argiles pesades, amb alt contacte entre partícules i alta capacitat de retenció d'humitat, són altament conductores. Les sorres gruixudes, amb contacte limitat entre partícules i baixa capacitat de retenció d'humitat, són mals conductors. En sòls salins, la resposta de la CEa ve condicionada per la presència de sals dissoltes a l'aigua dels porus del terra. Així, els valors de la CEa de les taques salines solen ser molt més altes que els obtinguts en argiles pesades.
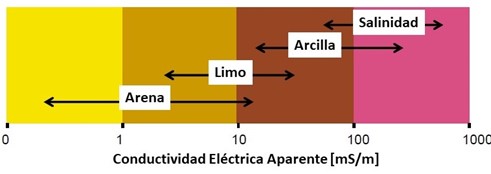
Figura 1. Correspondència aproximada entre la conductivitat elèctrica aparent del sòl i l'abundància al sòl de les diferents fraccions texturals i/o salinitat. Font: adaptat de Lund et al. (1999) i https://www.veristech.com/the-sensors/v3100 .
Sensors per a la mesura de la CEa
Els sensors existents per mesurar la CEa en continu es diferencien segons el mètode utilitzat per introduir o induir un corrent elèctric a terra: contacte galvànic directe, o per inducció electromagnètica. La CEa es mesura en siemens per metre (S/m), encara que en el cas d'aquest tipus de mesuradors, i a causa de la magnitud del corrent injectat i mesurat, la unitat més habitual són els milisiemens per metre (mS/m).
Sensors de contacte galvànic (o de resistivitat)
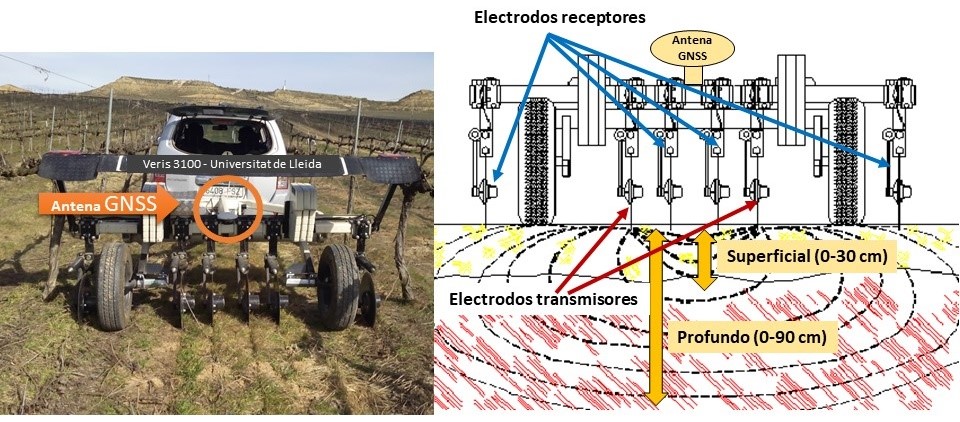
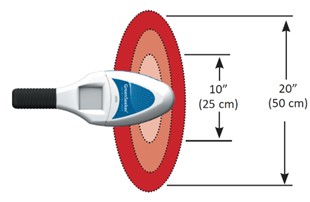
Es basen en la introducció d'un corrent elèctric a terra a través d'elèctrodes (transmissors) en contacte amb la superfície del sòl (a molt poca profunditat) i en el mesurament de la diferència en el potencial de flux de corrent en elèctrodes de potencial (receptors). Un exemple d‟aquest tipus d’instruments és el desenvolupat per Lund et al. (1999), anomenat Veris 3100 Soil EC Mapping System (Veris Technologies, Inc., Salina, KS, EUA). Certament, el principi de funcionament és força simple i la configuració es coneix com “Wenner array”. La Figura 2 mostra el principi de funcionament. El corrent elèctric és injectat a terra a través d'un parell de discos que penetren a terra uns 4-6 cm i que actuen com elèctrodes de corrent (elèctrodes de transmissió). Depenent de les propietats fisicoquímiques del sòl, aquest serà millor o pitjor conductor de l'electricitat, i el sensor captarà un senyal elèctric de més o menys magnitud. Això es fa mitjançant dues parelles addicionals de discos (elèctrodes de voltatge o receptors). Un d'aquests parells de discos de voltatge es troba situat entre els discos de corrent, i la CEa associada a aquests discos és la corresponent a una profunditat de sòl entre 0-30 cm. Els altres dos discos de voltatge estan situats als extrems de la barra suport o bastidor, per fora de les rodes de transport. Aquesta distància més gran entre discos permet tancar un circuit elèctric dins d'una profunditat aproximada de fins a 90 cm. Per tant, mitjançant aquesta configuració dual, el sensor Veris 3100 proporciona dues mesures de CEa (superficial i profunda). Aquesta funcionalitat és avantatjosa, ja que permet inferir si les propietats del sòl es mantenen uniformes amb la profunditat o, per contra, el sòl presenta capes o horitzons amb diferents propietats edàfiques contrastants. Cal tenir en compte que en parcel·les agrícoles l'horitzó superficial és el més alterat durant les operacions de conreu.
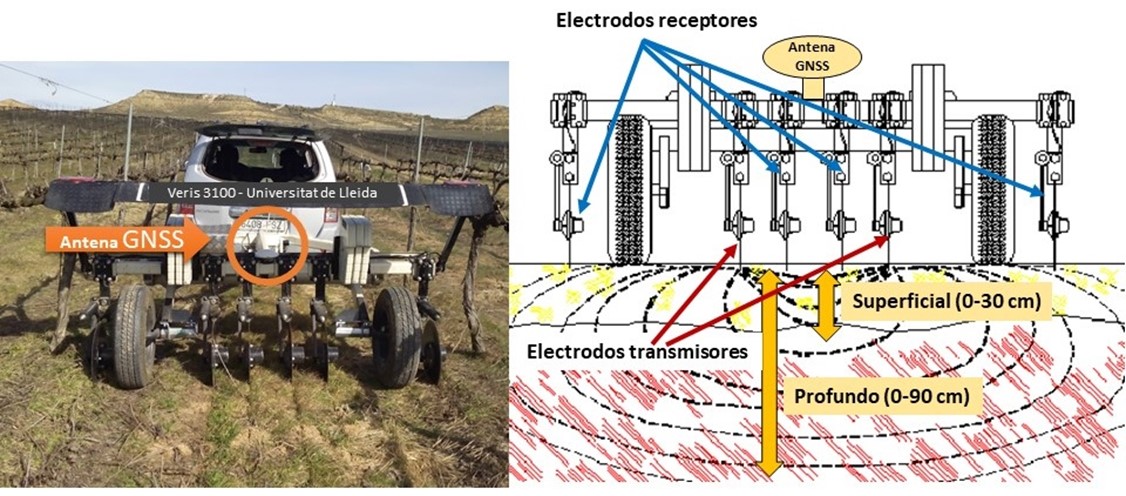
Figura 2. Esquerra: mesurador de CEa de contacte galvànic Veris 3100 (Veris Technologies, Inc., Salina, KS, EUA) de la Universitat de Lleida. Dreta: Il·lustració del principi de funcionament del sensor Veris 3100. El sensor registra la conductivitat elèctrica aparent de dues profunditats de sòl explorats: superficial (0-30 cm) i profund (0-90 cm). Mostra un punt cada segon i el georeferencia mitjançant un receptor GNSS que realitza una correcció diferencial a partir del senyal EGNOS, cosa que garanteix una precisió submètrica de la localització de les lectures. Font: foto José A. Martínez, gràfic adaptat de https://www.veristech.com/the-sensors/v3100.
Sensors d´inducció electromagnètica
Un altre tipus de sensors per mesurar la CEa són els d'inducció electromagnètica (IEM). L'aplicació de la IEM a la mesura de la CEa va aparèixer per primera vegada a finals de la dècada de 1970 i principis de 1980, per tal de mesurar la salinitat del sòl (Corwin i Lesch, 2005). Actualment, els dos mesuradors de CEa d'aquesta tipologia més estesos i utilitzats són l'EM38 (Geonics Ltd., Canadà) i el Dualem-2 (Dualem Inc., Milton, Canadà).
El principi del funcionament es mostra a la Figura 3. El sensor consta d'una barra on hi ha tres bobines, una a un extrem i les altres a l'altre. Una d'aquestes bobines està alimentada per un corrent altern i genera un camp magnètic primari que s'introdueix a terra. El desplaçament del sensor, sense necessitat de contacte físic amb el terra, indueix un corrent elèctric, ja que el terra es comporta com un conductor. La major o menor capacitat del sòl per conduir el corrent elèctric fa que els corrents induïts generin, en una segona etapa, un camp magnètic secundari de magnitud proporcional que, afegit al camp magnètic primari, acaben travessant el camp magnètic que formen les altres bobines situades a l'altre extrem de la barra. Aquestes bobines tenen debanats diferents, un en sentit vertical i l'altre en sentit horitzontal, cosa que fa que puguin captar el senyal a diferents profunditats. Així, el voltatge mesurat en aquestes bobines estarà doncs relacionat amb la CEa del sòl corresponent a diferents profunditats i, per tant, a diferents volums del mateix.
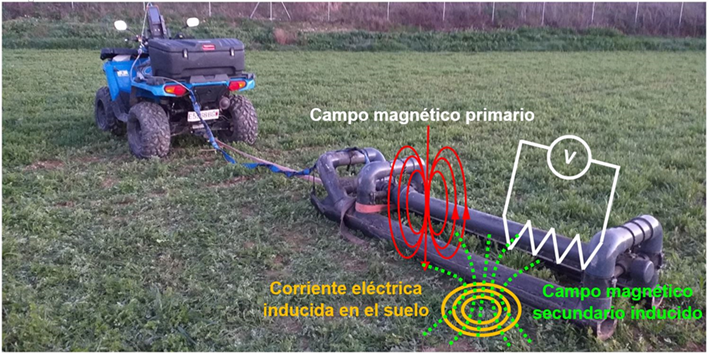
Figura 3. Exemple de mesurador de la CEa mitjançant inducció electromagnètica, en què es mostra el principi de funcionament. A la foto el sensor Dualem-2 (Dualem Inc., Milton, Canadà) muntat en un trineu de tubs de PVC i arrossegat per un quad (empresa Agrarium, Monzón, Huesca). Font: foto Jaume Arnó. Gràfic, elaboració pròpia.
A diferència dels sensors de contacte galvànic, els sensors de IEM tenen l'avantatge que no cal garantir un bon contacte entre el terra i el sensor. No obstant això, els sensors IEM requereixen un calibratge més complex. A més, la presència propera d'elements metàl·lics (com, per exemple, els pals metàl·lics per al guiatge dels arbres o ceps d'una plantació), pot ocasionar interferències en les mides. Pel que fa a la mesura de la CEa, totes dues tipologies de sensors presenten valors similars.
Més informació a:
Martínez-Casasnovas, J.A., Arnó, J., Escolà, A., 2022. Sensores de conductividad eléctrica aparente parra el análisis de la variabilidad del suelo ne Agricultura de Precisión. En: A. Namesny, C. Conesa, L. Martín, P. Papasseit (Eds.), Tecnología Hortícola Mediterránea. Evolución y futuro: viveros, frutales, hortalizas y ornamentales. Biblioteca de Horticultura, SPE3 S.L., Valencia, España. 1077 pp. ISBN: 978-84-16909-46-9. https://issuu.com/horticulturaposcosecha/docs/tecnologia_horticola_mediterranea , pag 775-796.
Bibliografía
Corwin, D.L., Lesch, S.M. (2003). Application of soil electrical conductivity to precision agriculture: theory, principles, and guidelines. Agronomy Journal, 95: 455–471.
Corwin, D.L., Lesch, S.M. (2005). Apparent soil electrical conductivity measurements in agriculture. Computers and Electronics in Agriculture, 46: 11–43.
Lund, E.D., Colin, P.E., Christy, D., Drummond, P.E. (1999). Applying soil electrical conductivity to precision agriculture. En: Proceedings of the Fourth International Conference on Precision Agriculture (pp. 1089–1100), St. Paul, MN, July 19–22, 1998. ASA-CSSA-SSSA, Madison, WI, USA.
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Tecnologia LiDAR en Agricultura de Precisió
Una de les tecnologies que més ha avançat en els darrers anys és la que es basa en el principi de funcionament LiDAR, una sigla anglesa per a LIght Detection And Ranging o, en català, detecció i mesura de distàncies amb llum. D’una manera equivalent a la tecnologia radar i sonar, on es fan servir ones de ràdio i so, respectivament, la tecnologia LiDAR fa servir llum per a detectar objectes i per a estimar la distància entre ells i el sensor.
Bàsicament, els sensors basats en LiDAR emeten polsos de llum i esperen a que els retorni part de l’energia emesa després de rebotar en els objectes del seu voltant. A partir d’aquí el sensor estima a quina distància i en quin angle es troba l’objecte en qüestió. A partir de les dades d’aquests sensors es poden reconstruir les escenes mesurades. Tanmateix, per a fer-ho ens cal integrar aquests sensors en sistemes que inclouen altres components com receptors SSNG, unitats inercials de mesura (IMU), sistemes d’adquisició i altres components. Aquests sistemes se solen anomenar escàners làser donat que la llum que solen fer servir és una llum làser amb una longitud d’ona situada a la zona de l’infraroig proper.
Classificació de sensors basats en LiDAR
En funció del vehicle que s’utilitzi per a desplaçar aquests sistemes, podem parlar d’escàners làser aeris o d’escàners làser terrestres. Els primers poden anar embarcats en drons, avionetes, helicòpter i, fins i tot, en satèl·lits (gedi.umd.edu). Els terrestres poden ser estacionaris, portàtils, quan són transportats per persones, i mòbils, quan són transportats per vehicles.
Pel que fa, concretament, als sensors basats en LiDAR, aquest component dels escàners làser es poden classificar en 1D, 2D i 3D segons el tipus de dades que generen.
Els sensors 1D són aquells que realitzen mesures puntuals de distància o bé de distància i angle. En aquest cas, l’usuari apunta a un lloc concret i el sensor estima la distància. Les mesures obtingudes per aquest tipus de sensors seran una llista de punts i la seva distància i, opcionalment, també l’angle.
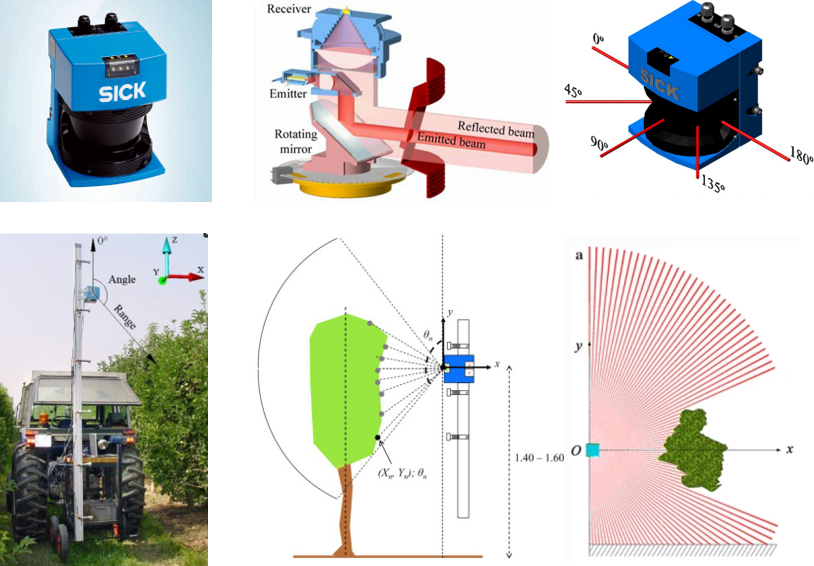
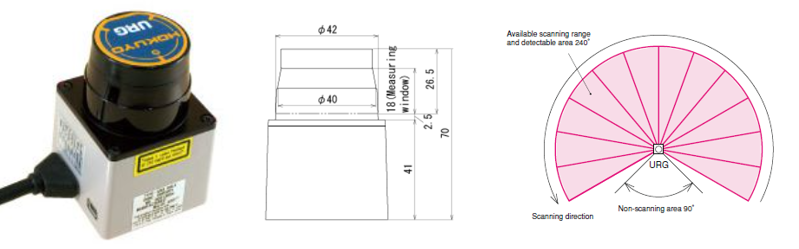
Els sensors 2D acostumen a tenir un emissor de llum únic i un mirall rotatiu que el fa sortir en diverses direccions d’un mateix pla d’escaneig. Aquest pla dependrà de la posició del sensor, podent ser vertical, horitzontal o estar inclinat en un determinat grau. Si es mesurar tota una escena, caldrà desplaçar el sensor 2D per tal de generar la tercera dimensió i obtenir dades tridimensionals que permetin reconstruir l’escena digitalment. Les mesures obtingudes amb un sensor 2D treballant en estàtic seran les coordenades polars (angle i distància de cada feix de llum) dels punts situats al pla d’escaneig. En cas de desplaçar el sensor integrant-lo en un sistema d’escaneig làser, caldrà determinar la posició del sensor a cada moment per tal d’anar situant cada pla d’escaneig a la seva posició real (Figura 1).
Figura 1. Animació d’un sensor basat en LiDAR. A dalt, vista en perspectiva del sensor. Al mig, vista en planta del sensor i l’escena escanejada. A baix, vista en planta de les mesures obtingudes en un pla d’escaneig (Autoria: Mike1024 a commons.wikimedia.org/w/index.php?curid=3688414).
Finalment, els sensors 3D generen per sí sols dades tridimensionals. Hi ha diferents tecnologies que ho permeten. Una d’elles és que el sensor LiDAR disposi de 2 miralls rotatius per a dirigir un únic feix de llum en diferents direccions de l’espai 3D. Una altra opció és que hi hagi un sol feix de llum amb un sol mirall rotatiu i que sigui el capçal del sensor els que roti per tal de generar diversos plans d’escaneig. Una altra opció és que hi hagi un sol feix de llum que sigui emès en direccions diferents per a generar diversos plans d’escaneig. També hi ha sensors que, en lloc de tenir 1 sol feix de llum en tenen més (actualment, entre 16 i 128) que realitzin mesures simultànies en sengles plans d’escaneig. Al mercat també hi ha sensors d’estat sòlid que no contenen elements mòbils i que permeten estimar distàncies en una matriu de punts rectangular. En generar mesures tridimensionals, alguns d’aquests sensors es fan servir de forma estacionària. Aquests sensors acostumen a ser els més exactes i precisos. Tanmateix, si es vol mesurar una escena gran o amb racons amagats, caldrà escanejar des de diferents estacions per a tenir tota l’escena capturada i registrar les mesures en un sol sistema de coordenades de referència. Alternativament, altres sensors 3D s’integren en sistemes d’escaneig mòbils, cosa que els permet escanejar escenes més grans de manera més còmoda. Això fa que perdin una mica d’exactitud i precisió respecte dels sistemes estàtics.
Dades dels escàners làser i informació obtinguda
El resultats obtinguts després d’un escaneig són una col·lecció de distàncies i angles, coordenades de receptors SSNG i rotacions d’unitats inercials que caldrà processar convenientment per a obtenir el producte final, que, habitualment, és un núvol de punts tridimensional que recrea l’escena escanejada en un espai 3D digital.
En Agricultura de Precisió, les dades obtingues es poden fer servir per a obtenir les dimensions i la geometria del dosser foliar tant de cultius baixos com de cultius arboris (alçades, amplades, seccions transversals i volums). A més, a partir de les mesures LiDAR també es poden obtenir paràmetres estructurals com la porositat del cultiu, l’ocupació de l’espai o la superfície foliar, entre d’altres. Per a determinar alguns d’aquests paràmetres cal establir relacions empíriques amb els paràmetres obtinguts amb mètodes convencionals.
El desenvolupament dels algorismes d’extracció d’informació, dels índex derivats de les dades i la seva aplicació encara estan en fase de desenvolupament però l’ús d’aquest tipus d’informació és molt prometedor en Agricultura i Fructicultura de Precisió.
Aplicacions de les dades 3D a l’Agricultura de Precisió
El resultat del processament de les dades LiDAR pot ser informació del dosser foliar per cada arbre, en plantacions en vas, o bé cada pocs centímetres al llarg de les files, en cultius en línia. Les dades obtingudes es poden fer servir en temps real (on-the-go) o bé en Agricultura de Precisió en base a mapes. En aquest darrer cas, donat que tota la informació està georeferenciada, fàcilment es poden crear mapes de la distribució espacial d’algun dels paràmetres obtinguts.
Les aplicacions d’aquestes dades tridimensionals són les següents:
- Estimació dels volum de vegetació d’una manera molt més acurada.
- Detecció i quantificació de la variabilitat en el desenvolupament dels cultius per a la detecció de problemes.
- Ajust de la dosificació de recursos agrícoles a les dimensions del dosser foliar: productes fitosanitaris, fertilitzants, regs, etc.
- Localització d’àrees amb risc potencial de malalties o afectacions.
- Maneig de la capçada amb operacions de poda.
- Estimació de la càrrega de fruits i de les seves dimensions.
- Noves aplicacions que es podran desenvolupar ara que aquest tipus de dades està disponible a un cost raonable.
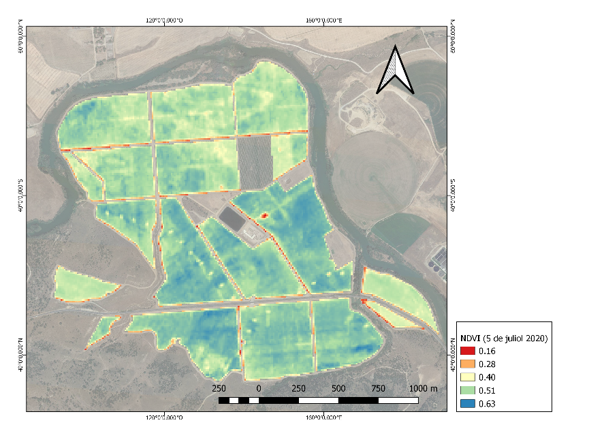
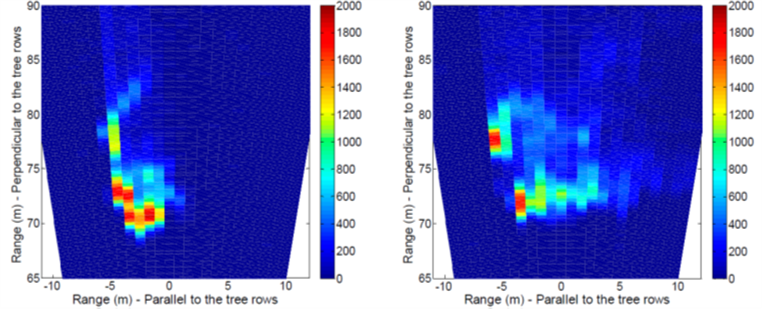
Al Grup de Recerca en AgròTICa i Agricultura de Precisió, una de les seves línies de recerca és generar i aplicar dades 3D dins del marc de l’Agricultura de Precisió. A la Figura 2 es mostra un exemple de dos mapes ràster de volum de vegetació. La seva diferència, píxel a píxel, indica el creixement de la vegetació.
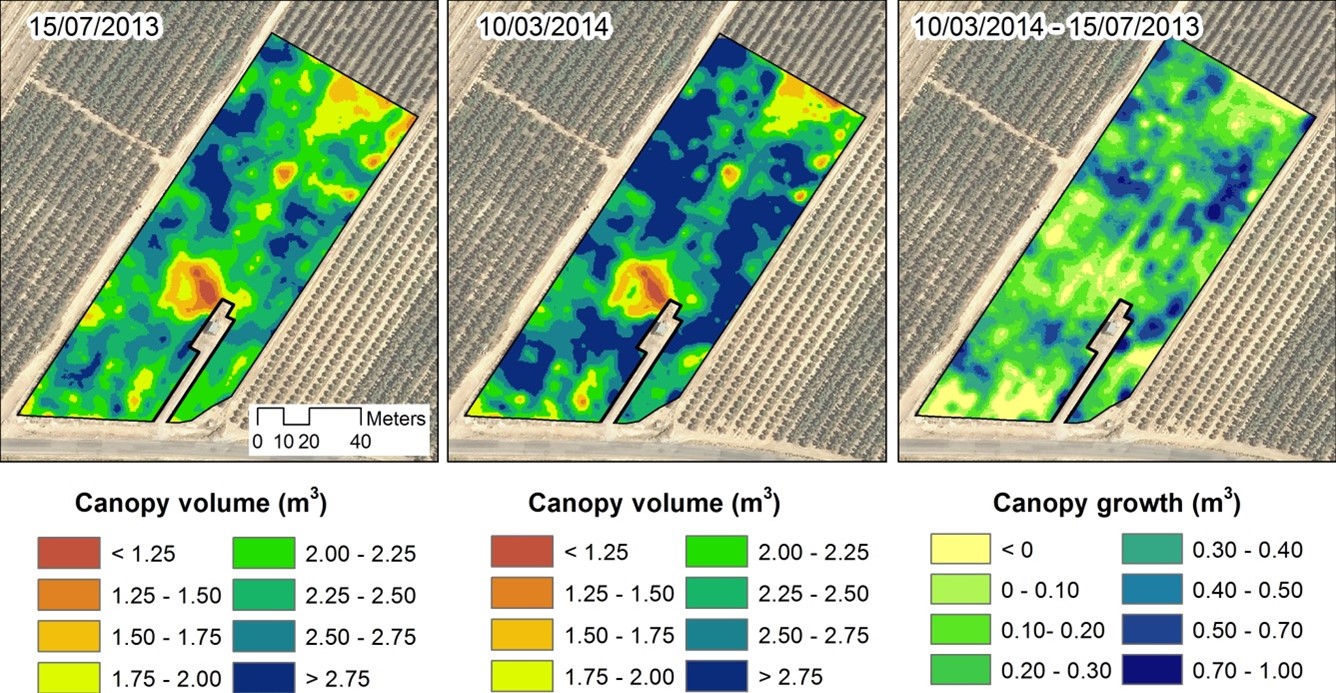
Figura 2. Mapes de volum de vegetació en una plantació d’olivers superintentius en dos dates diferents (esquerra i centre) i mapa de creixement (dreta). Font: Precision Agriculture 18(1), 111-132. DOI: 10.1007/s11119-016-9474-5.
Altres tecnologies per a l’obtenció de dades 3D de cultius
La tecnologia LiDAR no és l’única disponible per a obtenir dades 3D de cultius i dels seu entorn. Actualment, també és possible utilitzar càmeres RGB convencionals conjuntament amb tècniques fotogramètriques per a reconstruir escenes agrícola tant des de l’aire (amb drons) com des del terra. Al mercat també hi ha les anomenades càmeres RGB-D, que a més de generar imatges digitals en color (RGB), a cada píxel li assignen la distància a la que es troba de la càmera.
Tota aquesta oferta convida a pensar que en un futur proper aquestes dades seran fàcilment i econòmica a l’abast d’agricultors i tècnics.
Fabricants de sensors i de sistemes d’escaneig
A continuació hi ha una llista no exhaustiva ni prioritzada de fabricants de sensors basats en tecnologia LiDAR:
- Sick: sick.com
- Hokuyo: hokuyo-aut.jp
- Velodyne: com
- Leica: leica-geosystems.com/es-es/products/laser-scanners
- Ouster: com
- Riegl: riegl.com
- Teledyne: teledyneoptech.com
- Trimble: trimble.com/products-and-solutions/laser-scanning
- Topcon: topconpositioning.com/es/topograf%C3%ADa/escaneo
- Altres
A continuació hi ha una llista no exhaustiva ni prioritzada de fabricants de sistemes d’escaneig portàtils i mòbils:
- Terrestres:
- Viametris: com
- Leica: leica-geosystems.com/es-es/products/mobile-mapping-systems/capture-platforms
- GreenValley International: greenvalleyintl.com
- Altres
- Aeris:
- Leica: leica-geosystems.com/es-es/products/airborne-systems ; leica-geosystems.com/es-es/products/laser-scanners/autonomous-reality-capture
- GreenValley International: greenvalleyintl.com/LiAirV70
- YellowScan: yellowscan-lidar.com
- Riegl: riegl.com/products/unmanned-scanning
- LidarUSA: lidarusa.com
- Altres
Més informació a:
Publicacions científiques del Grup de Recerca en AgròTICa i Agricultura de Precisió: http://www.grap.udl.cat/ca/publications/Publicacions-cientifiques
Referències
Llibre Sensing Approaches for Precision Agriculture:
Gregorio E, Llorens J. 2021. Chapter 3. Sensing crop geometry and structure. A: Kerry R & Escolà A (eds). Sensing Approaches for Precision Agriculture. Cham, Suïssa. Springer Cham. p. 59-92. ISBN 978-3-030-78430-0.
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)
Mètodes de mostreig per a l’estimació de la collita en fructicultura
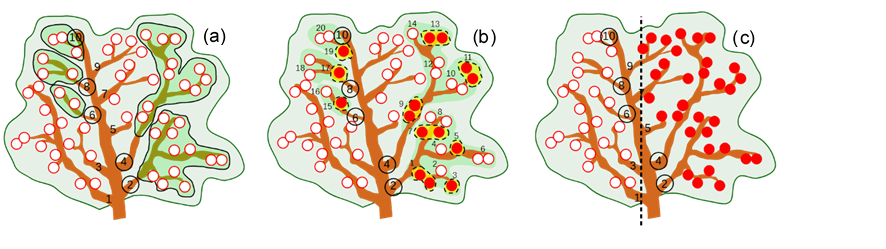
El comptatge de fruits (o càrrega de fruita) és el paràmetre normalment utilitzat a l’hora d’estimar la collita potencial de fruita a nivell de parcel·la, resultant finalment una estimació de pes o productivitat (kg/ha) que dependrà de l’espècie, varietat i calibre comercial esperable. Donat que aquest compteig de fruits es realitza normalment pels propis fructicultors i/o tècnics de les explotacions, un factor clau per tal d’obtenir estimacions no esbiaixades i precises és la selecció adequada dels arbres a mostrejar dins la parcel·la. Fins i tot, la possible aplicació els propres anys de la detecció electrònica de fruits (visió per ordinador i utilització de diferents sensors òptics) probablement requerirà també de l’aplicació de tècniques de mostreig. Això ha de permetre un ús dirigit d’aquestes tecnologies només en determinades zones, optimitzant els recursos i processant únicament les dades estrictament necessàries.
El nombre mínim d’arbes (o unitats de mostreig) a analitzar sol estar relacionat amb la producció esperada en tones (Taula 1, Ordre Ministerial PRE/1950/2005), sent aquesta recomanació aplicable en poma, pera, albercoc, pruna i préssec.
Taula 1. Número mínim d’unitats de mostreig segons producció(1)
|
Unitat de mostreig |
Producció de la parcel·la en tones |
||||||
|
Fins a 2 |
Fins a 5 |
Fins a 10 |
Fins a 20 |
Fins a 40 |
Fins a 60 |
Fins a 100 |
|
|
Arbre |
3 |
6 |
8 |
10 |
12 |
14 |
16 |
(1) A partir de 100 tones, s’afegeix un arbre cada 10 tones addicionals
A nivell pràctic, els mètodes de mostreig que s’apliquin han de fer possible que l’error de mostreig (és a dir, la diferència entre el valor real i el valor estimat dividit pel valor real) no superi el 10% amb una probabilitat (o confiança) del 95%. Això significa que el mètode que s’utilizi ha de garantir que, com a màxim, només en el 5% dels mostrejos es pugui superar l’error estipulat del 10%. I, a poder ser, aquest requisit d’estimació no esbiaixada i el més exacta possible ha de poder complir-se utilitzant un nombre reduït d’arbres (Taula 1), és a dir, aplicant un mètode que sigui el més precís possible.
Al tutorial “Mètodes de mostreig per a l’estimació de la collita en fructicultura” podeu consultar els diferents mètodes actuals en AP.
Noves perspectives en mostreig d’arbres fruiters
El desenvolupament de la detecció de fruits mitjançant sensors i visió per ordinador obre noves oportunitats en l’estimació de la collita. Possiblement, tot i la consolidació d’aquesta tecnologia, continuarà sent necessari el disseny d’esquemes de mostreig que n’optimitzin el seu ús en grans parcel·les dins de grans explotacions. Per tant, la qüestió que queda ara per resoldre és la possible combinació de mètodes avançats de mostreig i tècniques modernes de visió i detecció de fruits per a una estimació més precisa de la collita, ja sigui en termes de càrrega de fruita o en termes de producció potencial en kg o tones per hectàrea.
La pràctica del mostreig en fructicultura ens diu que la variabilitat (entre arbres o dins l’arbre) pel que fa al nombre de fruits, sol ser major que la variabilitat que presenta la seva mida o calibre. Per això, els esforços inicials s’han dirigit des de sempre a fer millors estimacions de la càrrega de fruita abans que de la distribució de calibres. No obstant, a curt/mig termini cal esperar, amb l’aplicació dels sistemes de detecció, el desenvolupament de models de predicció que utilitzin combinadament dades de compteig, distribució de calibres i pes dels fruits per a una estimació acurada i precisa de la collita.
Aquesta obra està sota una llicència de Creative Commons Reconeixement-NoComercial-CompartirIgual 4.0 Internacional(CC BY-NC-SA 4.0)



















 (5)
(5)
 (6)
(6)