Datasets
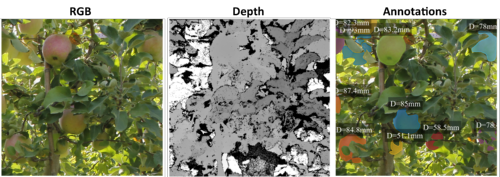
PApple_RGB-D-Size dataset
The PApple_RGB-D-Size dataset is composed by 3925 RGB-D images of Fuji apples trees with ground truth annotations for apple segmentation and apple diameter estimation. The reader can find more information about this dataset here.
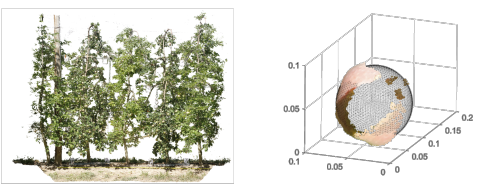
PFuji-Size datset
The PFuji-Size dataset includes a total of 615 Fuji apples scanned in-field conditions and an additional 25 apples scanned in laboratory conditions. Structure-from-motion and multi-view stereo techniques were used to generate the 3D point clouds of the captured scene. Apple locations and ground truth diameter annotations are provided for assessing fruit detection and size estimation algorithms. The reader can find more information about this dataset here.
AgLiMatch dataset
The agricultural LiDAR data to evaluate scan matching techniques (AgLiMatch dataset) is comprised of a set of Velodyne VLP-16 LiDAR captures and the corresponding GNSS-RTK tracks acquired in a Fuji apple orchard using an autonomous platform. The reader can find more information about this dataset here.

KEvOr dataset
The Kinect Evaluation in Orchard conditions (KEvOr) dataset is comprised of a set of RGB-D captures carried out with the Microsoft Kinect v2 to evaluate the performance of this sensor at different lighting conditions in agricultural orchards and from different distances to the measured target. The reader can find more information about this dataset here.

Fuji-SfM dataset
Fuji-SfM dataset contains 582 images of 11 Fuji apple trees to generate the 3D model of the scanned scene by using structure-from-motion photogrammetry. Additionally, the dataset includes the position ground truth (in global coordinates) of the 1455 apples that contains the 11 scanned trees, as well as 288 additional images manually annotated to train and test the instance segmentation neural network Mask-RCNN. Find more information about this dataset here.

LFuji-air dataset
The LFuji-air dataset contains 3D LiDAR data of 11 Fuji apple trees scanned from different sensor positions and applying different forced air flow conditions, allowing the analysis of using forced air flow and different sensor positioning for fruit detection, yield prediction and geometric characterization. Find more information about this dataset here.

KFuji RGB-DS database
The KFuji RGB-DS database is composed by 967 multi-modal images of Fuji apples on trees captured using Microsoft Kinect v2. Each image contains information from 3 different modalities: color(RGB), depth(D) and range corrected intensity(S) -related with the reflectance-. Find more information about this dataset here.
