Who we are?
The Research Group in AgroICT & Precision Agriculture (GRAP) was born in 2002 bringing together researchers from two institutions: the University of Lleida (UdL, Universitat de Lleida) and the Centre for Agricultural Mechanization (CMA, Centre de Mecanització Agrària), Department of Agriculture, Livestock, Fisheries, Food and Natural Environment of the Generalitat of Catalunya. However, its researchers have been working together for over 20 years and constitute one of the reference groups on Application Techniques of pesticides and on Precision Agriculture and Livestock Farming in Spain and internationally, with several patents and utility models in this area. The group is also a pioneer in the design of intelligent robotic feeders for Precision Livestock Farming with one of the first patents in this field and various feeders installed in France and Canada. In early 2014, the group integrates to the research center Agrotecnio, of the CERCA institution.
The research group consists of researchers from various fields, so that knowledge and application areas covered are complementary. Researchers at the University of Lleida belong to the Department of Agricultural and Forest Engineering and the Department of Chemistry, Physics and Environmental and Soil Sciences and provide knowledge related to the application of sensors in agriculture, data acquisition and interpretation, using geostatistical analysis models, the automation and the development of variable rate technologies in agricultural machinery, implementation of GPS systems, and modeling and designing systems to support decision making. Researchers from the Centre for Agricultural Mechanization provide knowledge related to the application of pesticides in fruit crops and field crops and established a relationship with agribusiness equipment and machinery. This composition facilitates the multidisciplinary approach needed for research and development of new technologies of information and communication in agriculture and livestock.
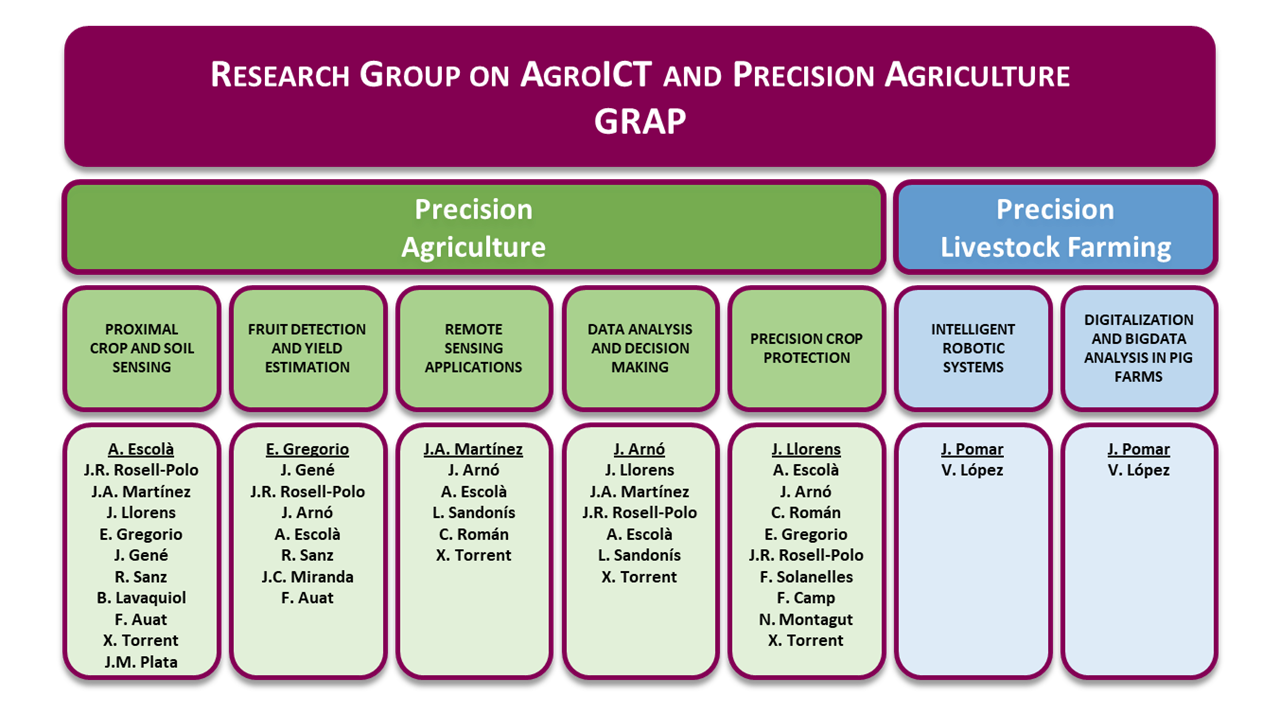
Organization chart of the GRAP
The following chart details the research lines of the GRAP as well as the distribution of its members. However, the group mainly works in a cooperative way, and therefore, in addition of this assigment, other collaborations are also possible.