1.1. Sensores terrestres de cultivo y suelos
Participantes: A. Escolà, J.R. Rosell-Polo, J.A. Martínez-Casasnovas, J. Llorens, E. Gregorio, J. Gené, R. Sanz, B. Lavaquiol.
En Agricultura de Precisión, la convención más ampliamente utilizada es que los sensores embarcados en plataformas terrestres se considera que hacen detección cercana o terrestre, mientras que los que no tienen contacto con el suelo (embarcados en drones, avionetas tripuladas o satélites) se considera que hacen teledetección. Con esta premisa, el GRAP trabaja con distintos tipos de sensores para caracterizar los cultivos y su entorno y georeferenciar los datos obtenidos.
1.1.1. Caracterización 3D de la vegetación
En fruticultura, la información sobre las características geométricas y estructurales de las plantaciones tiene innumerables aplicaciones. Conocer y tener en cuenta las dimensiones externas del dosel foliar (altura, anchura y volumen), así como también las características internas y la estructura de la copa (porosidad, ocupación del espacio e índice de área foliar) puede mejorar el manejo de las explotaciones. Concretamente, operaciones como la aplicación de productos fitosanitarios, el riego, la fertilización y las técnicas de poda y formación de los cultivos se pueden realizar de forma más eficiente cuando se tiene en cuenta la variabilidad de la vegetación. El conocimiento de las características geométrico-estructurales de las plantaciones permite optimizar el uso de recursos y, con ello, reducir el impacto medioambiental y económico de su aplicación.
El GRAP está especializado en la utilización de sensores LiDAR (Light Detection and Ranging) para la creación de nubes de puntos tridimensionales, a partir de las cuales se puede obtener información sobre la vegetación útil para la toma de decisiones de manejo agronómico. Además, el GRAP también dispone de cámaras RGB-D y utiliza técnicas de fotogrametría para caracterizar el dosel foliar y sus frutos.
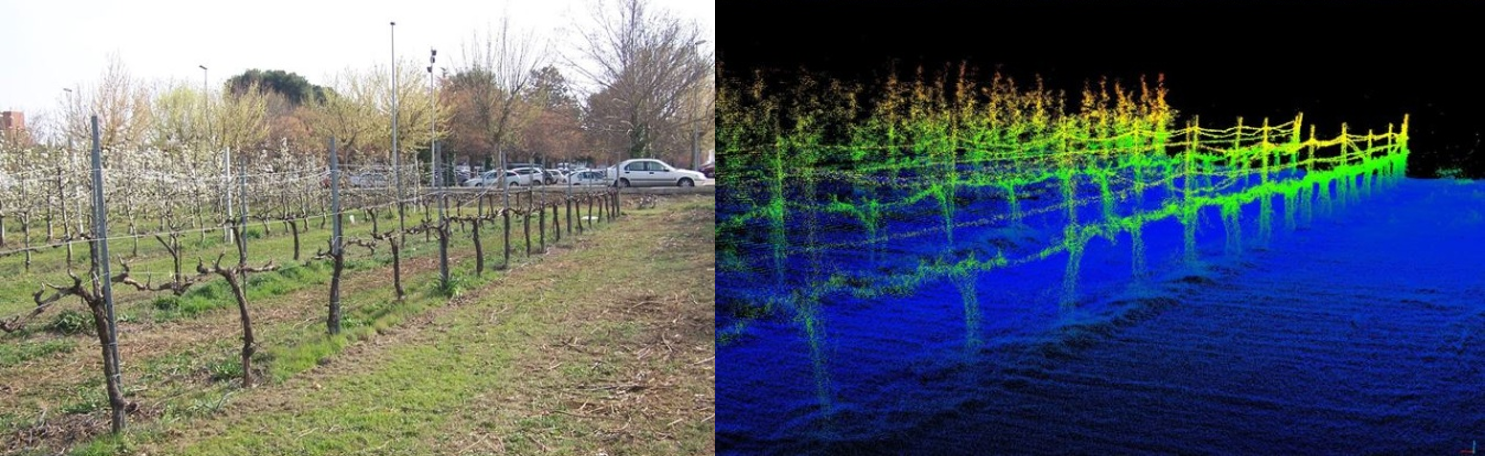
Figura 1. Ejemplo de una parcela experimental de la ETSEA escaneada con un escáner terrestre móvil basado en tecnología LiDAR (youtu.be/7Gj0TjafIMY).
Actualmente, el GRAP dispone de un escáner láser terrestre portátil y de un vehículo todo terreno eléctrico que le permite escanear plantaciones frutales, viñas y también cultivos extensivos con fines de investigación. Sin embargo, para que un modelo 3D del cultivo sea de utilidad directa para el agricultor/a o técnico/a, es necesario extraer información de las nubes de puntos tridimensionales y mostrarla con un formato útil como, por ejemplo, los mapas digitales de parámetros de copa. Estos mapas pueden mostrar la altura del cultivo, la anchura de la copa, su volumen, su porosidad o, incluso, el crecimiento entre dos fechas en cualquier punto de la parcela y visualizar si su distribución es uniforme o variable en la parcela. Con estos mapas y con toda la información auxiliar de la que dispone el agricultor/a o la empresa asesora se podrán tomar decisiones de manejo mejor fundamentadas.
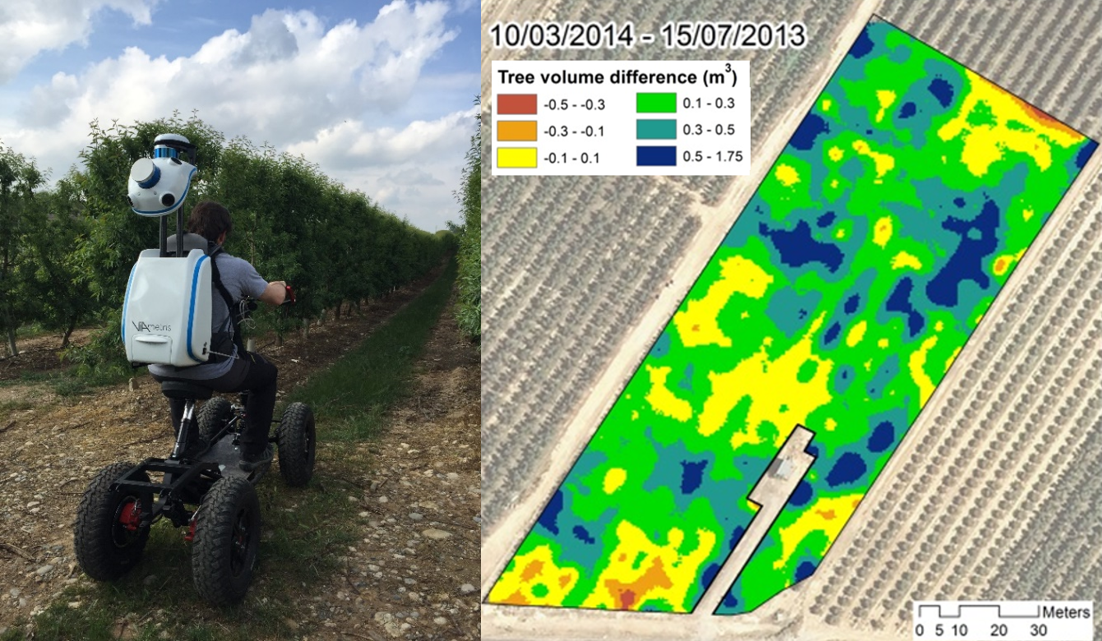
Figura 2. Escáner láser terrestre portátil Viametris bMS3D basado en sensores LiDAR (izquierda) y mapa de crecimiento de la vegetación entre dos fechas de escaneo (derecha). Fuente: Precision Agriculture 18(1), 111-132. DOI: 10.1007/s11119-016-9474-5.
Entre las aplicaciones de los datos 3D del cultivo en el manejo agronómico se encuentran las siguientes:
- Detección y cuantificación de la variabilidad del cultivo en la parcela.
- Detección y localización de problemas.
- Manejo de la copa a partir de la poda de invierno o la poda en verde.
- Ajuste de la dosis de recursos agrícolas como productos fitosanitarios, fertilizantes o riego.
- Localización de zonas con potencial riesgo de infección de plagas o enfermedades.
- Detección de frutos y estimación de cosecha.
1.1.2. Caracterización del suelo
Una fuente de variabilidad importante del cultivo es el suelo. Si el suelo, en tanto que almacén de agua y nutrientes, no es uniforme, difícilmente el cultivo crecerá uniformemente y producirá frutos uniformes. Además, el suelo es espacialmente variable de forma natural y esta variabilidad no sólo es en superficie, sino también en profundidad.
Una forma de conocer la variabilidad del suelo de toda una parcela es utilizando sensores que hagan medidas sobre la marcha (on-the-go). El GRAP dispone de un sensor Veris 3100 que mide la conductividad eléctrica del suelo a dos profundidades: a) de 0 a 30 cm y b) de 0 a 90 cm. El sistema permite obtener medidas de conductividad del suelo georeferenciadas, a razón de una medida por segundo, por lo que la resolución de muestreo dependerá de la velocidad de avance y del ancho de trabajo.
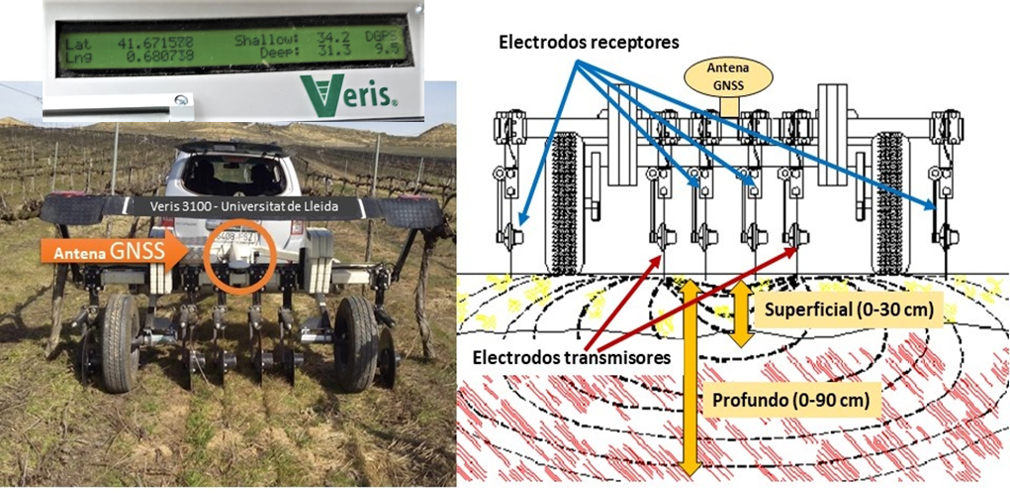
Figura 3. Sensor Veris 3100 del GRAP. Fuente: Veris Technologies, Inc. Salina, KC, USA.
La conductividad eléctrica del suelo está relacionada con el contenido de agua del suelo, el contenido de materia orgánica, la textura, la capacidad de intercambio catiónico, la profundidad y el contenido de sales. Por tanto, los valores de conductividad eléctrica del suelo obtenidos no permiten conocer la composición concreta del suelo en cada punto de una parcela pero sí su uniformidad. Así, una vez obtenidas las medidas de conductividad eléctrica del suelo y siempre con los conocimientos edáficos necesarios de la zona analizada, podrá crearse un mapa de la parcela que permitirá establecer zonas potenciales de manejo específico.
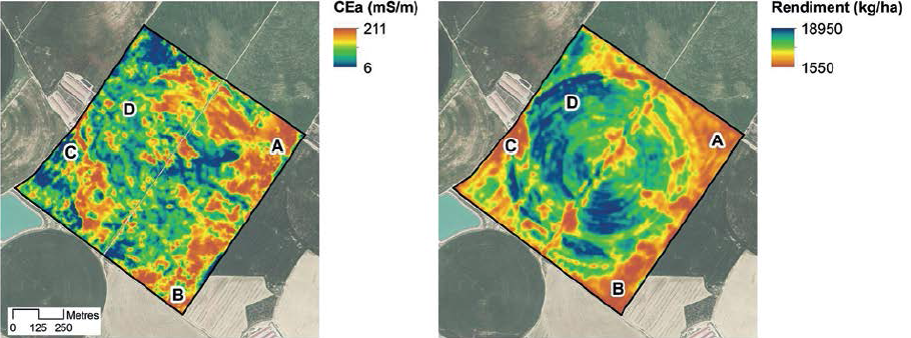
Figura 4. Comparación de la conductividad eléctrica aparente del suelo (CEa) de una parcela agrícola dedicada a cultivos extensivos obtenida a partir de las datos del sensor Veris 3100 (izquierda), y mapa de cosecha de maíz de la misma parcela (derecha). Las letras indican distintos sitios para la comparación que se comentan en el texto. Las paletas de colores de las leyendas están invertidas para facilitar la comparación. Fuente: Elaboración propia.
Las aplicaciones de este tipo de sensores de suelo son las siguientes:
- Análisis de la variabilidad del cultivo.
- Delimitación de zonas potenciales de manejo agronómico del cultivo para
- Riego variable.
- Fertilización variable.
- Siembra variable.
- Delimitación de sectores de riego en función de la capacidad de retención de agua de cada zona.
- Predicción de la cosecha, junto con datos de vigor del cultivo.
1.1.3. Sistemas automatizados de adquisición de datos
En esta línea de investigación se desarrolla una plataforma para realizar tareas de adquisición de datos asociados a la agricultura de precisión, de forma que éstas se realicen de forma más automatizada y autónoma. La función principal de esta plataforma es la de poder incluir los sistemas de percepción adecuados para poder tomar las muestras necesarias en las diferentes observaciones que se realicen sobre el terreno. La toma de datos y la resolución del muestreo se adaptarán a las necesidades de cada sistema sensorial.

Figura 5. Imagen de la plataforma autónoma diseñada en un campo de prácticas de la ETSEA.