1.3 Aplicaciones de la Teledetección
Participants: J.A. Martínez-Casasnovas, J. Arnó, A. Escolà, L. Sandonís, C. Román
1.3.1. Caracterización espectral de la vegetación
La Teledetección supone la adquisición de información de la superficie terrestre en forma de imágenes mediante sensores o cámaras, normalmente multiespectrales, a bordo de satélites, aeronaves, o vehículos aéreos no tripulados (UAV, drones o Remotely Piloted Aircraft Systems – RPAS). Estas imágenes se usan en el análisis, cartografía, seguimiento del estado de los diferentes tipos de cubiertas (agua, suelos, vegetación, etc.), sin entrar en contacto físico con ellos.
La aplicación de técnicas de teledetección está teniendo un gran auge en agricultura, y más concretamente en Agricultura de Precisión. Sin duda, la disponibilidad de imágenes gratuitas, a una resolución de 10 m gracias a los satélites de la misión Sentinel-2 de la Unión Europea, y también la posibilidad de adquirir imágenes de constelaciones como PlanetScope (Planet Labs.), con repetitividad diaria y una resolución de 3-4 m, está abriendo el abanico de aplicaciones en el seguimiento del desarrollo de los cultivos para la toma de decisiones sobre el manejo diferencial de los mismos (Figura 1). Las imágenes de PlanetScope son de pago mediante suscripción, pero, al igual que con Sentinel-2, ya hay empresas intermediarias que contratan la subscripción y posteriormente ofrecen servicios a los agricultores de seguimiento del vigor de los cultivos a precios razonables de entre 4-8 €/ha año.
Los drones (Figura 1) son otro tipo de plataforma, en cierta manera más versátil que, sin duda, ha popularizado la Agricultura de Precisión, pues el nivel de detalle capaz de registrar se asocia con la idea de imágenes más precisas y que se pueden hacer en cualquier momento.
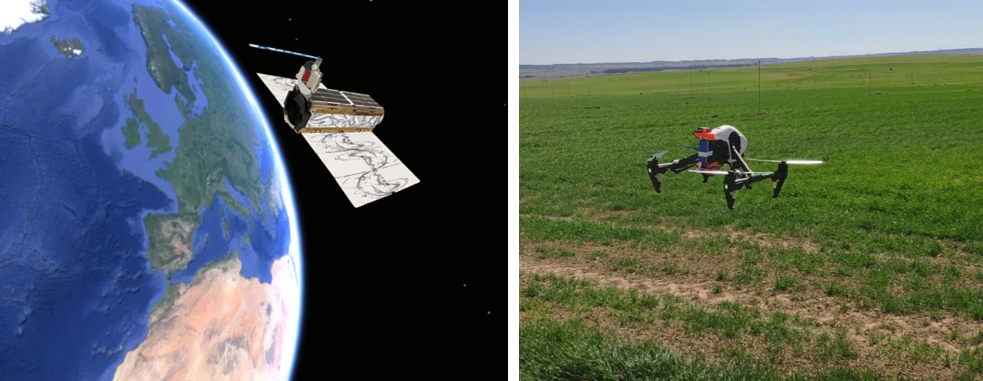
Figura 1. Izquierda: Microsatélite o Dove de Planet Labs, con dimensiones de 10x10x30cm. La constelación está compuesta por unos 140 de estos microsatélites que captan imágenes de forma continuada. Derecha: Cuadricóptero con cámara multiespectral iniciando el vuelo sobre una parcela de cebada para la cartografía del desarrollo vegetativo.
¿Qué tipo de sensor es mejor para el seguimiento del desarrollo vegetativo de los cultivos para Agricultura de Precisión? La Figura 2 puede ayudar a responder esta pregunta. En ella se compara una imagen de Sentinel-2A, una imagen de PlanetScope y una imagen adquirida con un dron DJI Inspire1 y cámara Parrot Sequoia. Todas son del mismo día, pero tienen diferentes resoluciones: 10 m, 3 m y 0,06 m respectivamente. Esto quiere decir que un píxel de PlanetScope tiene un nivel de detalle de casi 11 veces más que un píxel de Sentinel-2 y, atención, la imagen de dron es 27890 más detallada que la de Sentinel-2. También, la imagen de dron es 2500 veces más detallada que la de PlanetScope. Pero, ¿es necesaria tanta resolución? Seguramente no para el caso de los cultivos extensivos, ya que la maquinaria de aplicación variable no actuará con tanta precisión y el tipo de cultivo no lo requiere. No obstante, en otro tipo de cultivos (viña, frutales, hortícolas) y en parcelas más pequeñas, las imágenes de dron pueden ser de gran utilidad, ya que puede distinguir la vegetación a lo largo de las filas del cultivo del suelo desnudo o malas hierbas de la zona entre filas. La resolución de 3 m de la imagen de PlanetScope podría ser la mejor opción, si bien hay que tener en cuenta el pago-por-subscripción a la empresa propietaria o el pago-por-servicio a una empresa intermediaria. Respecto a la resolución de Sentinel-2, la comparación a nivel general con las otras imágenes más detalladas, muestra también las mismas zonas de variabilidad del desarrollo del cultivo. Por otra parte, no se deben dejar de considerar las imágenes que se pueden adquirir con cámaras multiespectrales desde avioneta, con resoluciones habituales entre 0,25 a 1 m.
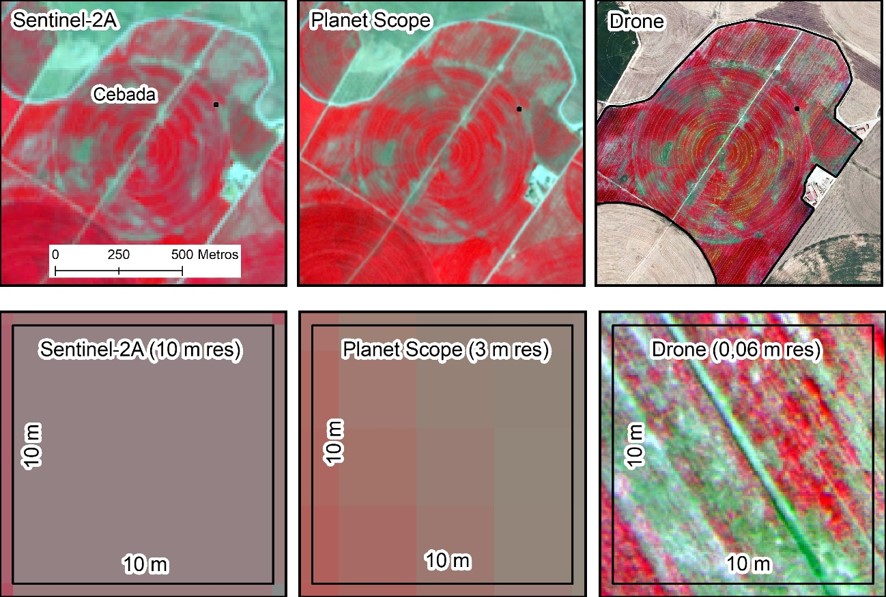
Figura 2. Comparación de imágenes en falso color (RGB Infrarrojo cercano-Rojo-Verde) de Sentinel-2, Planet Scope y drone a escala de parcela y a escala de 1 píxel de la misma resolución que las imágenes de Sentinel-2 (10x10 m). En cada caso se indica la resolución del tipo de imagen.
A partir de las imágenes multiespectrales, la determinación y seguimiento de los cultivos se hace a través de los llamados índices de vegetación o de vigor. El índice más conocido es el Índice de Vegetación de Diferencia Normalizada (NDVI en sus siglas en inglés). Se trata de un cálculo simple que utiliza la cantidad de luz que reflejan las plantas en la longitud de onda del rojo (R) y del infrarrojo próximo (IRP): NDVI = (IRP-R)/(IRP+R). El fundamento de esta fórmula puede verse en la Figura 3. Las plantas sanas absorben la luz del espectro visible, principalmente la luz roja, para llevar a cabo la fotosíntesis y reflejan mucho más la luz del infrarrojo próximo. Por tanto, cuanto más vigor tiene la planta, mayor es la absorción de luz roja (menos reflexión) y mayor es la reflexión del infrarrojo próximo. Esto, traducido a la fórmula del NDVI significa que una planta sana tendrá un mayor valor del índice y una planta enferma o con algún tipo de estrés un valor menor.
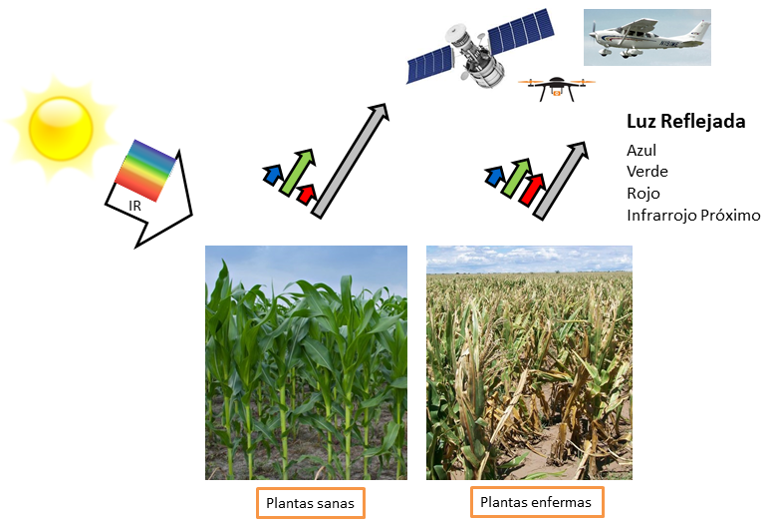
Figura 3. Fundamento del cálculo de los índices de vigor a partir de imágenes multiespectrales. Las plantas sanas (izquierda) absorben la luz del espectro visible, principalmente la luz roja, para realizar la fotosíntesis y reflejan más la luz del infrarrojo próximo, por tanto, la diferencia entre estas dos magnitudes será mayor y así también el índice de vegetación. Las plantas que sufren algún tipo de problema (derecha) presentarán una mayor reflexión de la luz roja y menor de la del infrarrojo próximo, resultando en un valor de índice de vegetación menor.
El NDVI es el índice más conocido y es el que se suele usar como referente para estimar el vigor de las plantas a partir de imágenes multiespectrales, pero existen otras muchas combinaciones entre bandas que pueden dar una información similar. Luego, los científicos tienen que establecer relaciones entre estos índices y las características fisiológicas de las plantas o bien con el rendimiento final de los cultivos.
Los índices de vegetación se pueden usar para propósitos de Agricultura de Precisión de diversas maneras y en diferentes momentos del ciclo de cultivo. Pongamos algunos ejemplos desarrollados por el GRAP.
Antes del comienzo de la campaña, y en base a los datos de la campaña precedente o anteriores, los índices de vegetación se pueden usar para definir zonas de manejo diferencial dentro de cada parcela, ya sea para la siembra variable, abonado de fondo, aplicación de enmiendas orgánicas u otras y, si es posible, el riego también diferencial. Para tales propósitos, puede ser mejor no basar la zonificación en una sola imagen de una fecha específica del cultivo anterior, sino en la integración de imágenes adquiridas a lo largo de todo el ciclo de cultivo, acumulando el valor del índice de vegetación. Esto puede mostrar mejor la variabilidad estructural en las diferentes partes de la parcela, dando una visión más realista del potencial productivo de las diferentes zonas del campo (Figura 4).
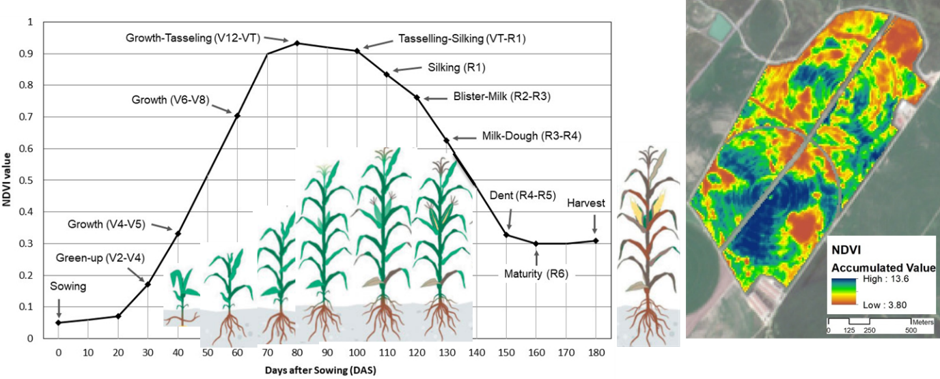
Figura 4. Ejemplo de NDVI a lo largo del ciclo del cultivo del maíz e imagen del NDVI acumulado, que puede representar mejor el potencial productivo relativo de la parcela que no el NDVI de una fecha determinada. Fuente: Martínez-Casasnovas et al. (2018).
¿Qué pasa si no tenemos toda una serie de imágenes para estimar el potencial productivo de la parcela? En algunos casos, los agricultores solo podrán pagar una imagen o contratarán un servicio para conocer la variabilidad del vigor del cultivo y tomar decisiones en base a la información que se derive de ellas. En estos casos, y para dirigir el abonado de fondo y/o la siembra del cultivo posterior, lo mejor sería adquirir imágenes del cultivo anterior de justo antes de la floración (p.e., en maíz o cereales de invierno, o al comienzo de la maduración o envero (p.e., en vid). En otras etapas, los cultivos (tal vez) no han alcanzado su máxima expresión vegetativa o ya está disminuyendo. Durante la floración (p.e., maíz), el color de la inflorescencia puede interferir con el verdor de la vegetación y alterará la respuesta espectral en las bandas utilizadas para calcular los índices de vegetación. Así, las imágenes del periodo que va desde el momento en que el cultivo cubre totalmente el suelo hasta la floración es el más aconsejable (Figura 4).
- Durante la campaña, los índices de vegetación sirven, principalmente, para seguir el estado del cultivo y para decidir sobre las acciones de manejo a realizar. Estas acciones pueden ser diversas. Siguiendo el ciclo del cultivo (p.e., en cultivos extensivos como maíz o cereales de invierno), una de las primeras acciones a realizar es la aplicación del abonado de cobertera, principalmente nitrógeno (N). Las imágenes de teledetección son de gran interés en este caso, ya que el N supone uno de los principales costos en la producción de estos cultivos. El momento de adquisición de la imagen para este propósito es importante. Por ejemplo, en el maíz, el momento adecuado para adquirir imágenes es V6 (seis hojas). En ese momento, el cultivo casi cubre el suelo y aún es posible entrar para aplicar el fertilizante. Después del abonado de cobertera, el seguimiento del cultivo también es importante, particularmente en los cultivos de regadío. En estos casos, las imágenes no solo sirven para detectar el estrés hídrico y decidir el momento del riego, sino que los índices de vegetación también pueden ser muy útiles para detectar problemas como fallos en aspersores, diferente presión del agua a lo largo de los brazos de un pívot, fallo de boquillas, etc.
Otro tema importante es la predicción del rendimiento de los cultivos antes de la cosecha. Algunos índices de vegetación calculados a partir de imágenes de algunas semanas antes de la cosecha suelen estar bien correlacionados con el rendimiento (Figura 5), sin los inconvenientes de los monitores de rendimiento, o sin la necesidad de esperar hasta el final de la campaña para saber cómo puede ser el rendimiento final de la parcela. Así, los mapas de vigor pueden ser de utilidad para organizar la logística o para tener una previsión de los ingresos por la venta del grano.
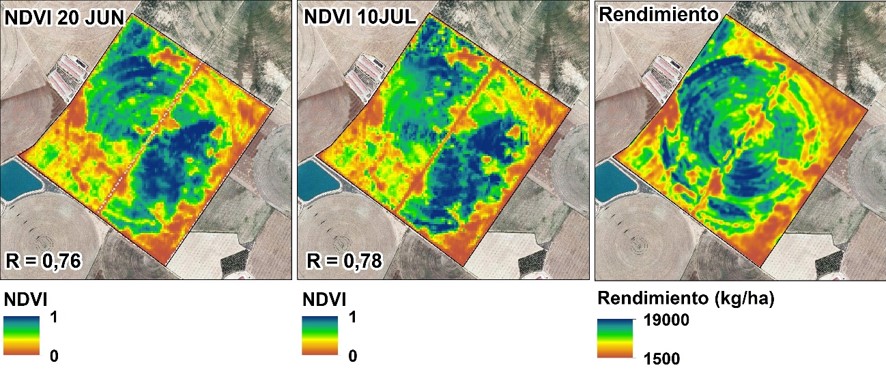
Figura 5. Comparación de mapas del índice de vegetación de la diferencia normalizada (NDVI) de una parcela de maíz en dos fechas y el correspondiente mapa de rendimiento obtenido a partir de datos de un monitor de cosecha al final de la campaña. Se muestra el coeficiente de correlación entre los datos de NDVI y Rendimiento, con valores de 0,76 y 0,78 respectivamente.
1.3.2. Aplicaciones de los drones (UAV)
La investigación y el desarrollo de vehículos aéreos no tripulados (UAV o drones) y sus aplicaciones en la agricultura y otras áreas ha aumentado notablemente en los últimos años. Hay numerosos ejemplos en la literatura científica, que van desde la obtención de mapas del vigor de los cultivos hasta la reconstrucción 3D de la arquitectura foliar de las plantaciones frutales. Como ejemplo, se muestran a continuación algunas en las que el GRAP ha trabajado.
Una de ellas es la determinación del estado nutricional (N) del maíz a través de índices espectrales y datos de altura derivados de imágenes de dron, con el fin de determinar la cantidad de N requerida por el cultivo justo antes de floración (Maresma et al., 2016). Este estudio fue motivado por la creciente demanda de servicios comerciales de UAV en la agricultura y la necesidad de ajustar las tasas de fertilización con N aplicadas a los cultivos de maíz. Así, se analizó la respuesta espectral de diferentes dosis diferentes de N inorgánico, N orgánico y combinaciones de N orgánico-inorgánico en parcelas experimentales (10 x 15 m) mediante una imagen fue adquirida por un dron Atmos-6 (CATUAV, Moià, Cataluña, España), y cámara VEGCAM-Pro con un sensor de imagen Fove-on X3 de 14 Mp que adquiría datos en tres bandas espectrales amplias (verde, rojo e infrarrojo cercano) (Figura 6).
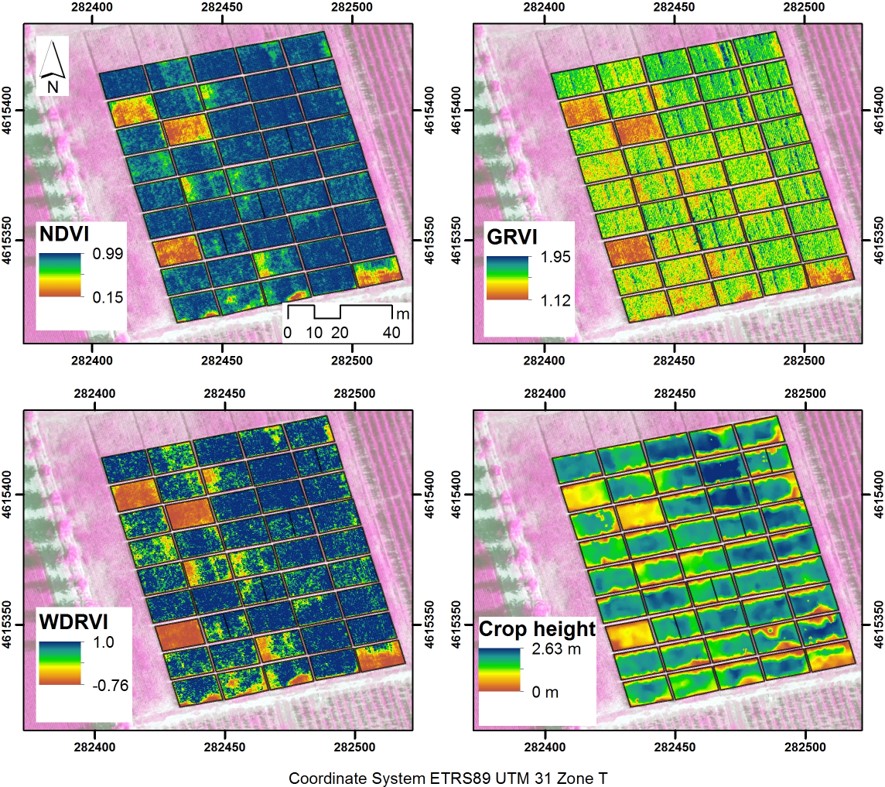
Figura 6. Índices de vegetación y altura del cultivo obtenidos a partir de imágenes multiespectrales adquiridas desde dron en parcelas de ensayo de diferentes cantidades de nitrógeno orgánico e inorgánico en maíz. Fuente: Maresma et al. (2016).
Los resultados obtenidos mostraron que el índice Wide Dynamic Range Vegetation Index (WDRVI) fue el mejor para distinguir entre tratamientos con aplicaciones por encima o por debajo de 250-300 kg N/ha y en la predicción de rendimiento de grano en la etapa V12 (Maresma et al., 2016).
En relación al ejemplo anterior, una de las aplicaciones más habituales de las técnicas de Agricultura de Precisión en cultivos extensivos es la fertilización variable. Para conocer la variabilidad intraparcelaria del vigor del cultivo, los agricultores se enfrentan al dilema de qué datos de teledetección utilizar: imágenes de satélite o imágenes de dron. Esta decisión depende del tamaño de las parcelas, pero la disponibilidad creciente de servicios comerciales basados en imágenes de dron hace atractivo para los agricultores utilizar estos servicios. A continuación, se presenta un caso de estudio desarrollado en el GRAP sobre la fertilización variable de nitrógeno en cobertera en cebada en base a una imagen de dron, en una parcela de 75 ha. La adquisición de la imagen se realizó en marzo de 2019 utilizando una cámara Sequoia (Parrot SA, París, Francia) montada en un DJI Inspire 1-T600 UAV (DJI Sciences and Technologies Ltd., Shenzhen, China) (Figura 1). El tamaño de píxel de las imágenes adquiridas fue de aproximadamente 0,07 m. Se adquirieron un total de 2850 fotos y se creó un mosaico calibrado para las cuatro bandas espectrales con la ayuda del software Pixel4D. A partir de aquí, se calculó el NDVI y se clasificó en 3 clases con un algoritmo k-means. Se evaluó el servicio y el costo/beneficio para el agricultor teniendo en cuenta un costo de 32 €/h para la adquisición y procesamiento de datos, un precio de 200 €/Mg para el fertilizante y un precio obtenido para la cebada de 180 €/Mg. El rendimiento promedio en cada zona fue: 4300 kg/ha en la zona de bajo vigor, 6600 kg/ha en la zona de vigor medio y 8900 k/ha en la zona de alto vigor. La Figura 7 muestra los resultados del mapa NDVI derivado de la imagen multiespectral adquirida. En comparación con el beneficio bruto hipotético obtenido con el abonado uniforme, el abonado variable basado en el servicio de dron generó beneficios brutos de alrededor de 43 €/ ha
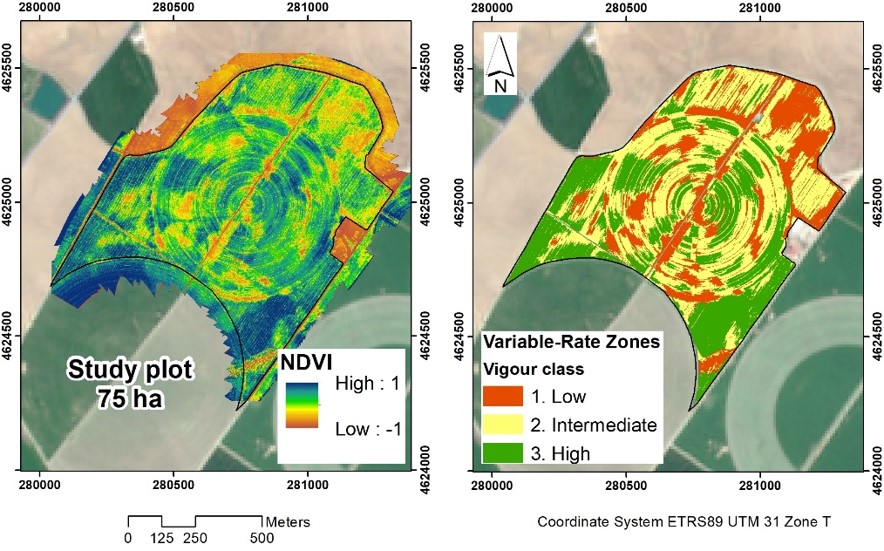
Figura 7. Izquierda: NDVI derivado de la imagen multiespectral adquirida en marzo de 2019 para evaluar el estado de desarrollo de la cebada para determinar el abonado de cobertera con dosis variable. Derecha: zonas de fertilización variable. Fuente: Jensen et al. (2021).
En un enfoque diferente, Martínez-Casasnovas et al. (2013) aplicaron imágenes de dron multitemporales para cuantificar los efectos de la erosión por cárcavas efímeras en parcelas de viña, así como evaluar los efectos de la erosión en el desarrollo de las cepas. Para ello se utilizó un UAV Atmos-6 de ala fija equipado con una cámara Sony NEX-C3-na. Las imágenes de resolución de 9 cm permitieron la cuantificación de volúmenes de cárcavas efímeras con alta precisión (Figura 8).
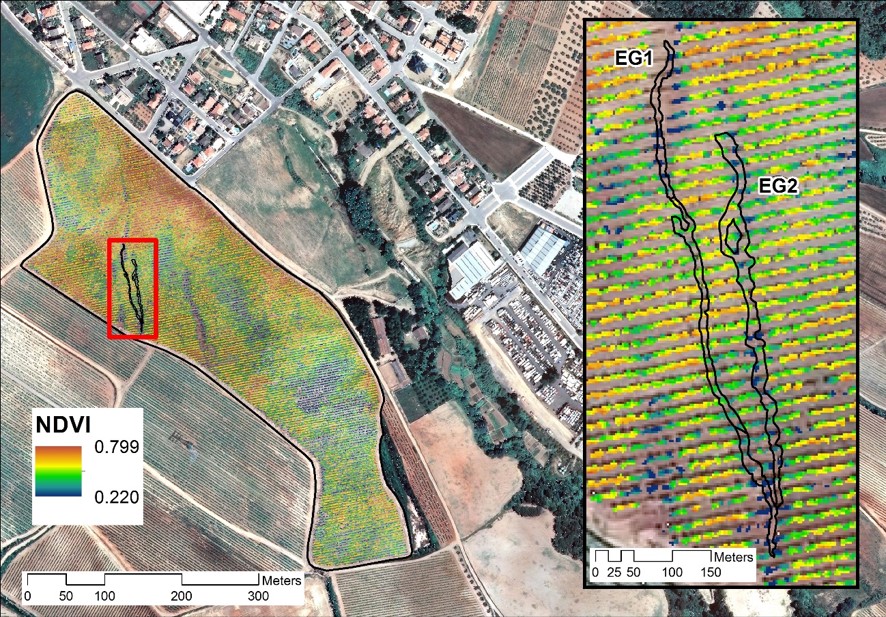
Figura 8. Parcela de viña localizada en els Hostalets de Pierola (Barcelona), donde se adquirieron imágenes de dron con una resolución de 9 cm para cuantificar la erosión en las cárcavas efímeras desarrolladas y su efecto en el desarrollo de las cepas. Fuente: Martínez-Casasnovas et al. (2013).
Los resultados sirvieron para determinar que la falta de implementación de medidas de conservación de suelo y agua en el viñedo estudiado está provocando importantes tasas de erosión por cárcavas y un descenso progresivo de la cota de la superficie del suelo. Esto repercute en el desarrollo de las cepas medido a través del NDVI.
Otra de las aplicaciones de las imágenes de dron, muy diferente a la caracterización del vigor o desarrollo de los cultivos, es la posibilidad de obtener la posición 3D de cada píxel de la imagen gracias a la técnica denominada Structure from motion. Se trata de una técnica fotogramétrica de bajo coste y fácil de usar, para la obtención de datos de alta resolución en un rango de escalas, capaz de representar un objeto 2D a 3D con sólo unas cuantas fotografías desde diferentes puntos de vista. Así, con un mínimo de 3 fotografías tomadas desde diferentes puntos de vista de un objeto y sin saber la posición exacta, se puede reconstruir estas imágenes 2D a 3D, que se pueden georreferenciar en durante el proceso a través de puntos de control conocidos.
En la Figura 9 se muestra un ejemplo de la reconstrucción 3D de una plantación intensiva de almendros dispuestos en seto mediante el programa Agisoft Metashape (Agisoft LLC, St. Petesburg, Russia). A partir del modelo digital de superficie que se genera se puede determinar, en este caso, parámetros geométricos de la plantación como la anchura y la altura de cada tramo especificado a lo largo de las filas, o bien el número de puntos adquiridos a partir de una determinada altura (p.e. a partir del suelo), que se puede correlacionar con la densidad foliar en cada sección (Sandonís-Pozo et al., 2022).
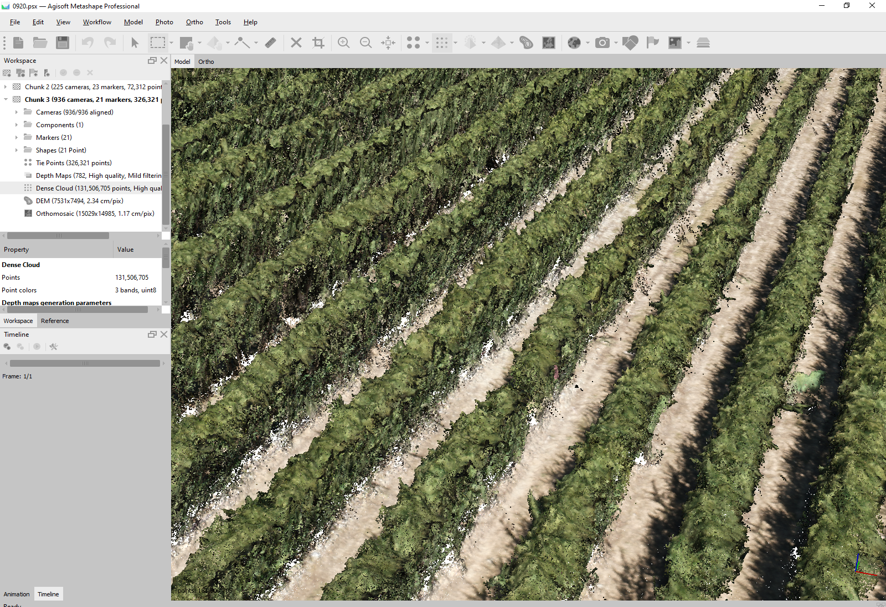
Figura 9. Captura de pantalla del programa Agisoft Metashape con la reconstrucción de una plantación intensiva de almendros mediante la técnica Structure from Motion. A partir del modelo generado se pueden calcular parámetros geométricos de la plantación en cada sección, de interés en el manejo del dosel foliar para Agricultura de Precisión.
Por último, destacar en este apartado de aplicaciones de los drones su utilización en la aplicación de precisión de productos fitosanitarios (Figura 10). Presentamos aquí un ejemplo de aplicación con un dron de la empresa Ebredrone SL (Amposta, Cataluña, España) sobre viña realizado en el marco del proyecto de investigación PAgFRUIT (http://www.pagfruit.udl.cat), mediante un ortocóptero capaz de transportar hasta 10 kg de carga líquida o microgranulado sólido. La combinación de velocidad y potencia significa que se puede cubrir un área de 4,000 a 6,000 m² en solo 10 minutos. El sistema de pulverización inteligente es capaz de ajustar automáticamente la dosis de acuerdo con la velocidad de vuelo para realizar una pulverización uniforme. El dron monta cuatro boquillas, colocadas directamente debajo de un motor. El flujo de aire generado por las hélices acelera la aplicación, aumentando su alcance (https://www.ebredrone.com). Este tipo de equipos incorporan tecnología de posicionamiento y navegación de alta precisión RTK, que ofrece posicionamiento de precisión centimétrica.

Figura 10. Ejemplo de aplicación de fitosanitarios mediante dron en un cultivo de viña. Empresa aplicadora Ebredrone SL (https://www.ebredrone.com) , proyecto PAgFRUIT (http://www.pagfruit.udl.cat).
Para saber más sobre las aplicaciones de los drones en Agricultura de Precisión, puede consultarse el capítulo de libro “Unmanned Aerial Vehicles (UAVs) in Precision Agriculture”, por Ryan R. Jensen, Perry J. Hardin, Eduardo Galilea, José A. Martínez-Casasnovas y Austin Hopkins, publicado en “Sensing Approaches for Precision Agriculture” (Ed. R. Kerry & A. Escolà, Springer 2021, https://doi.org/10.1007/978-3-030-78431-7
1.3.3. Estimación de parámetros geométricos y estructurales del dosel foliar a partir de índices de vegetación
En plantaciones frutales, uno de los principales factores a tener en cuenta a la hora de realizar el manejo del cultivo es el estado vegetativo y/o el nivel de desarrollo del dosel foliar. Esto es importante en diversos momentos de la campaña con el fin de definir acciones como la intensidad de poda, el riego, la fertilización y la aplicación de productos fitosanitarios.
Para determinar la arquitectura arbórea de los árboles de las plantaciones, sin duda el LiDAR terrestre es, quizá, la mejor opción, ya no solo por la “visión” lateral, sino también por la penetrabilidad de los rayos láser, que permiten determinar impactos en el interior del dosel foliar y determinar parámetros como la porosidad.
En esta línea, el GRAP está estudiando las relaciones entre los parámetros geométricos y estructurales de plantaciones intensivas de almendros y olivos con índices de vegetación índices derivados de imágenes de satélite. El objetivo final es poder extender la información medida con el LiDAR a toda una plantación o finca, difícil de caracterizar todavía a partir de LiDAR por el volumen de datos a procesar. Esto puede tener un gran interés para utilizar la información obtenida en el apoyo a la decisión de operaciones como la poda diferencial o la aplicación de productos fitosanitarios, entre otros; y para facilitar la delimitación de zonas de gestión dentro de las parcelas.
Un ejemplo es el trabajo de Sandonís-Pozo, et al., (en prensa) (Figura 11), donde se analiza la relación entre los parámetros geométricos y estructurales como anchura, sección transversal y porosidad en relación al NDVI, tanto con imágenes de Sentinel-2 como de PlanetScope. Estos índices sirven después para definir zonas con diferencias significativas de estas propiedades.
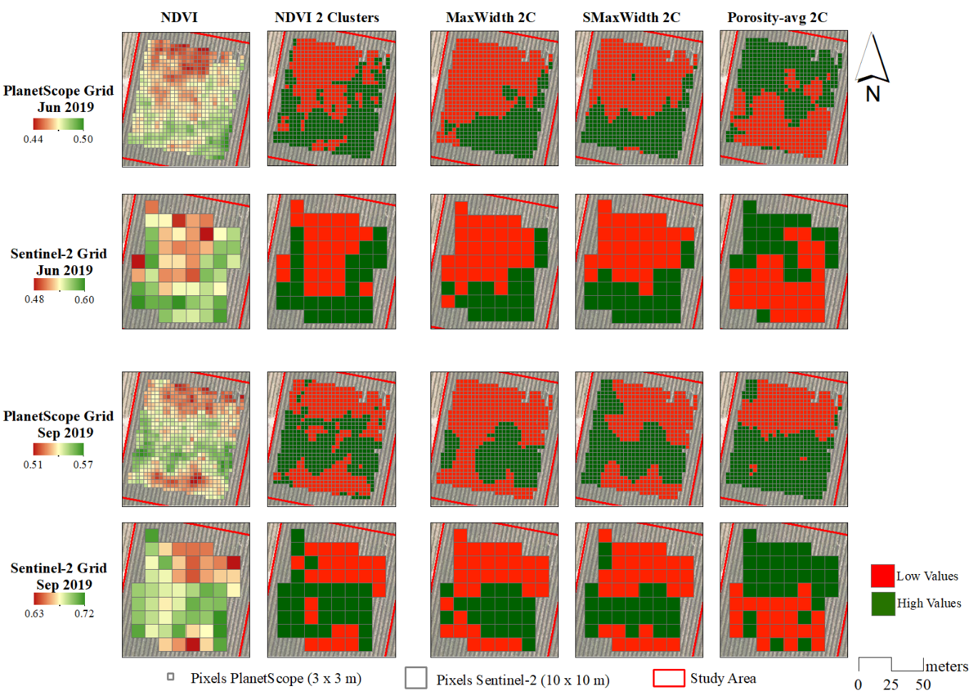
Figura 11. Relación entre el NDVI derivado de imágenes Sentinel-2 y PlanetScope en una plantación intensiva de almendros con los parámetros geométricos anchura máxima y sección transversal, y con la porosidad del dosel foliar. Fuente: Sandonís-Pozo et al. (en prensa).
Referencias bibliográficas
Jensen, R.R., Perry, J., Galilea, E., Martínez-Casasnovas, J.A., Hpokins, A. 2021. Unmanned Aerial Vehicles (UAVs) in Precision Agriculture. In: R. Kerry & A. Escolà (eds.), Sensing Approaches for Precision Agriculture, Springer Nature, Cahm, Switzerland, pp 253-274, https://doi.org/10.1007/978-3-030-78431-7
Martínez-Casasnovas, J.A., Ramos, M.C., Balasch, C. 2013. Precision analysis of the effect of ephemeral gully erosion on vine vigour using NDVI images. In: J. Stafford (ed.), Precision Agriculture’13, Wageningen Academic Publishers, Wageningen (The Netherlands), pp 777-783.
Maresma, A., Ariza, M., Martínez, E., Lloveras, J., Martínez-Casasnovas, J.A. 2016. Analysis of Vegetation Indices to Determine Nitrogen Application and Yield Prediction in Maize (Zea mays L.) from a Standard UAV Service. Remote Sensing 2016, 8, 973; https://doi.org/10.3390/rs8120973
Martínez-Casasnovas, J.A., Escolà, A., Arnó, J. 2018. Use of Farmer Knowledge in the Delineation of Potential Management Zones in Precision Agriculture: A Case Study in Maize (Zea mays L.). Agriculture 2018, 8, 84; https://doi.org/10.3390/agriculture8060084
Sandonís-Pozo, L., Plata-Moreno, J.M., Llorens, J., Escolà, A., Pascual-Roca, M., Martínez-Casasnovas, J.A. 2022. PlanetScope Vegetation Indices to Estimate UAV and LiDAR-derived Canopy Parameters in a Super-Intensive Almond Orchard. In: FRUTIC 2022, June 29-July 1 2022, Valencia, Spain. 5 pp.
Sandonís-Pozo, L., Llorens, J., Escolà, A., Arnó, J., Pascual, M., Martínez-Casasnovas, J.A., en prensa. Satellite Multispectral Indices to Estimate Canopy Parameters and Within-Field Management Zones in Super-Intensive Almond Orchards. Precision Agriculture, Springer Nature.