2.1 Sistemas inteligentes robotizados
Participantes: J. Pomar, V. López
El sector de la producción ganadera a nivel global se ve inmerso en grandes retos a los que tiene que dar respuesta tanto a corto como a medio plazo. Uno de estos retos es el incremento de la demanda mundial de carne y productos de origen animal, el cual se espera aumente en al menos un 40% en los próximos 15 años. La primera cuestión a la que se enfrenta el sector es cómo lograr una producción de carne de alta calidad, sostenible y alimentariamente segura, que pueda satisfacer esta demanda. Al mismo tiempo, el impacto medioambiental del sector ganadero es una cuestión importante con efectos sobre el cambio climático y la preservación del medio ambiente.
Ambos problemas nos conducen a la necesidad de mejorar la eficiencia de los sistemas productivos, concretamente la eficiencia en la alimentación de los animales, especialmente los monogástricos. Hay también una preocupación e interés creciente por la salud animal en relación con la seguridad alimentaria y la salud humana al mismo tiempo que se requiere una mejora del bienestar animal.
Todos estos problemas y necesidades pueden ser abordados mediante la ganadería de precisión (PLF – precision livestock farming). La PLF se ha definido como la gestión y el cuidado inteligentes de los animales de manera individualizada mediante el seguimiento/control automatizado continuo de la producción/reproducción, la salud y el bienestar de los animales, lo que permite realizar correcciones o intervenciones rápidas cuando se observan desviaciones de lo normal. Dicho de manera general, la PLF se fundamenta en el uso intensivo de los avances en las TIC y la ciencia animal y se orienta a ayudar a los ganaderos a mejorar la eficiencia, la calidad, el bienestar y la salud de la producción ganadera de manera sostenible.
Sistemas Inteligentes robotizados
La alimentación de precisión (AP) constituye hoy uno de los grandes logros en este ámbito. De manera sintética la podemos definirla como una nueva tecnología para la alimentación ganadera que hace posible proporcionar a cada animal de la granja, alimento en cantidad adecuada y de composición ajustada a sus necesidades, en ese momento. Ésto se muestra en la siguiente gráfica en la que podemos resaltar dos aspectos claves: 1) cada animal presenta unas necesidades diferentes y 2) las necesidades de cada animal (especialmente en proteína) varían de manera importante a lo largo del tiempo.
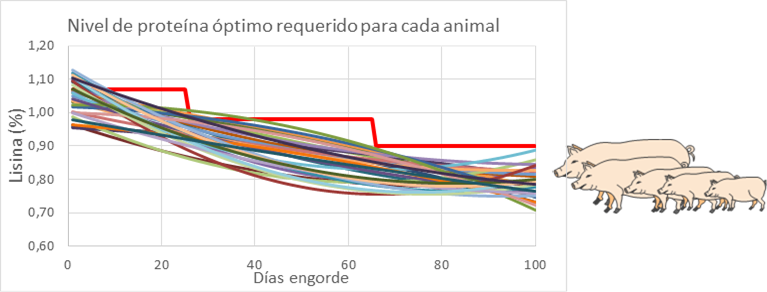
¿Qué necesitamos para implementar la Alimentación de Precisión en una granja? (1) Poder determinar las necesidades de cada animal en tiempo real (diariamente), y, (2) Disponer de una máquina inteligente capaz de alimentar a cada animal con un pienso ajustado a sus necesidades.
Equipos robotizados para la alimentación de precisión en granja
Con este desafío por delante, el Grupo de investigación, inició en 2004 una línea de I+D para el impulso de la “porcinocultura de precisión”, iniciando el diseño y desarrollo de un sistema robotizado de alimentación de precisión y gestión inteligente. Este proyecto, que precisaba de mucha I+D, se planteó conjuntamente con el Swine Research and Development Centre de Agriculture and Agri-Food Canada, especializado en el ámbito de la nutrición del cerdo. Fruto de este trabajo de colaboración se han conseguido avances significativos. Actualmente el desarrollo de estos alimentadores está liderado por diferentes convenios de colaboración entre la UdL y la empresa Exafan SAU, permitiendo mejorar las funcionalidades de tanto el equipo robotizado como el programa de gestión del alimentador.
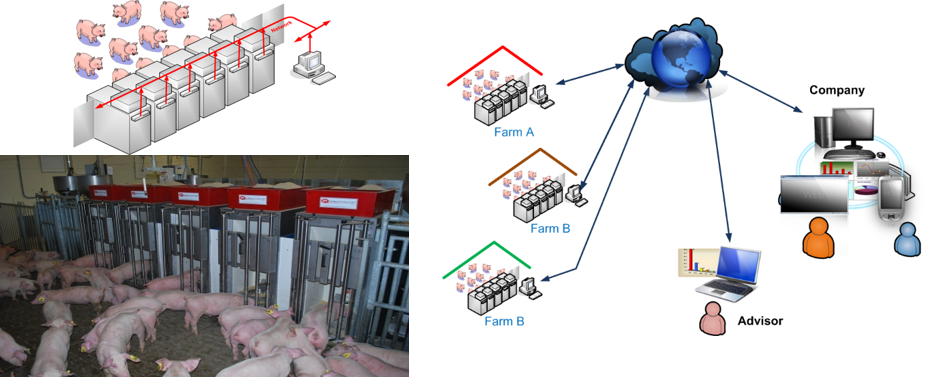
Estos equipos robotizados hacen posible la gestión avanzada de las granjas en tiempo-real con acceso telemático y con herramientas de ayuda a la toma de decisiones técnica, veterinaria y empresarial. Entre los resultados obtenidos con esta tecnología de alimentación de precisión, los alimentadores IPF-UdL están demostrando que es posible disminuir el consumo de proteína, reducir el Nitrógeno en los purines (10 – 30%), potenciar el crecimiento de los animales y mejorar el índice de transformación, de forma simultánea. Con este robot se hace factible la medida y la monitorización en tiempo real del crecimiento y el consumo de alimento de manera automática, los cuales son esenciales para implementar la alimentación de precisión y potenciar la automatización de las tareas de supervisión
Análisis de datos y toma de decisiones en AP
Esta segunda sublínea es complementaria a la sublínea anterior, ya que trata de desarrollar metodologías y herramientas de análisis frente a la información recogida por el alimentador de precisión. La madurez del mercado del cerdo tanto como blanco e ibérico empuja al sector a competir fuertemente por precio y calidad, lo que obliga a las empresas a desarrollar nuevas herramientas y estrategias que permitan mejorar su proceso productivo para mantener su competitividad.
Algunas de estas nuevas herramientas están basadas en modelos teóricos con el objetivo de calcular las necesidades nutricionales de los animales. Mediante la determinación de las necesidades individualizadas de cada animal es posible optimizar los insumos utilizados. Estos modelos deben calibrarse correctamente en relación con una población de referencia para garantizar que la estimación sea precisa. Sin embargo, estos modelos se ven desafiados por la dificultad de la calibración, pues los animales de las poblaciones reales pueden seguir patrones de crecimiento diferentes a los observados en las poblaciones de referencia.
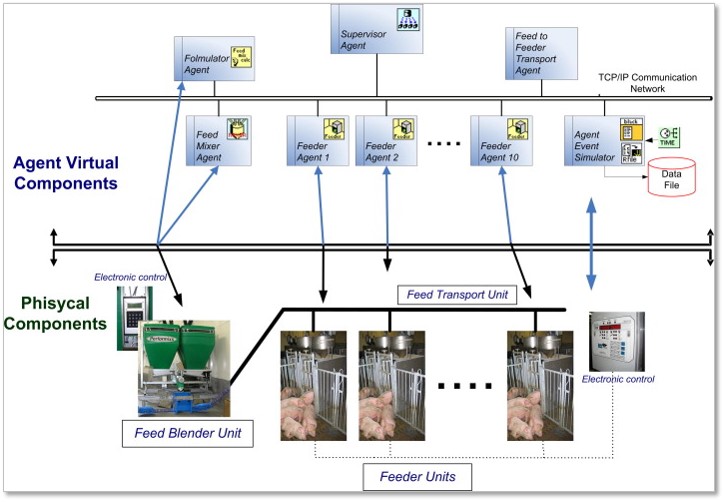
Modelización y simulación de sistemas complejos
El objetivo con el que se desarrolla un modelo es el de obtener de él respuestas que en un sistema real tardaría en darnos los resultados y además sería costoso obtener los mismos. La ejecución de esta simulación consiste en realizar experimentos sobre el modelo en lugar de hacerlos sobre el sistema real. Evidentemente se debe asegurar que el modelo sea una representación “válida” de la realidad. Además, conviene calcular la fiabilidad con la que se presentan los resultados.
El trabajo realizado en esta sublínea ha consistido en desarrollar varios módulos virtuales, siguiendo una arquitectura multiagente, los cuales representan componentes reales de una granja y realizan funcionalidades concretas. Una de las finalidades es desarrollar un lenguaje de comunicación sencillo – llamado ACL (Agent Communication Language) – mediante el cual los agentes involucrados interactuan entre sí de acuerdo con unos propósitos concretos.