1.1. Sensors terrestres de cultiu i sòls
Participants: A. Escolà, J.R. Rosell-Polo, J.A. Martínez-Casasnovas, J. Llorens, E. Gregorio, J. Gené, R. Sanz, B. Lavaquiol.
En Agricultura de Precisió, la convenció més àmpliament utilitzada és que els sensors embarcats en plataformes terrestres es considera que fan detecció propera o terrestre mentre que els que no tenen contacte amb el terra (embarcats en drons, avionetes tripulades o satèl·lits) es consideren que fan teledetecció. Amb aquesta premissa, el GRAP treballa amb diferents tipus de sensors per a caracteritzar els cultius i el seu entorn i georeferenciar les dades obtingudes.
Caracterització 3D de la vegetació
En fructicultura, la informació sobre les característiques geomètriques i estructurals de les plantacions té innombrables aplicacions. Conèixer i tenir en compte les dimensions externes del dosser foliar (alçada, amplada i volum), així com també les característiques internes i l’estructura de la capçada (porositat, ocupació de l’espai i índex d’àrea foliar) pot millorar el maneig de les explotacions. Concretament, operacions com l’aplicació de productes fitosanitaris, el reg, la fertilització i les tècniques de poda i formació dels cultius es poden realitzar de manera més eficient quan es té en compte la variabilitat de la vegetació. El coneixement de les característiques geometrico-estructurals de les plantacions permet optimitzar l’ús de recursos i, amb això, reduir l’impacte mediambiental i econòmic de la seva aplicació.
El GRAP està especialitzat en la utilització de sensors LiDAR (Light Detection and Ranging) per a la creació de núvols de punts tridimensionals a partir dels quals es pot obtenir informació sobre la vegetació útil per a la presa de decisions de maneig agronòmic. A més, el GRAP també disposa de càmeres RGB-D i utilitza tècniques de fotogrametria per a caracteritzar el dosser foliar i els fruits (Figura 1).
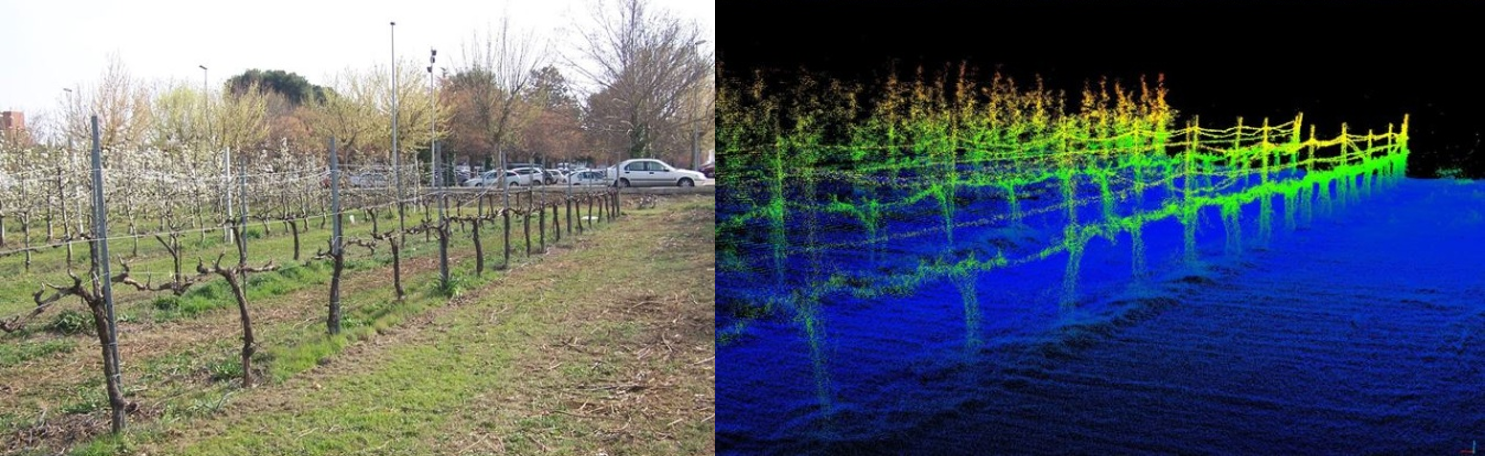
Figura 1. Exemple d'una parcel·la experimental de l'ETSEA escanejada amb un escàner terrestre mòbil basat en tecnologia LiDAR (youtu.be/7Gj0TjafIMY).
Actualment el GRAP disposa d’un escàner làser terrestre portàtil i d’un vehicle elèctric tot terreny que li permeten escanejar plantacions fruiteres, de vinya i també de cultius extensius amb finalitats de recerca. Tanmateix, per a que el model 3D del cultiu sigui d’utilitat directa per a l’agricultor/a o tècnic/a cal extreure informació dels núvols de punts tridimensionals i mostrar-la amb un format útil com, per exemple, els mapes digitals de paràmetres de capçada (Figura 2). Aquests mapes poden mostrar l’alçada del cultiu, l’amplada de la capçada, el seu volum, la seva porositat o, fins i tot, el creixement entre dues dates en qualsevol punt de la parcel·la i visualitzar si la seva distribució és uniforme o variable dins la parcel·la. Amb aquests mapes i amb tota la informació auxiliar de la que disposa l’agricultor/a o l’empresa assessora es podran prendre decisions de maneig més ben fonamentades.
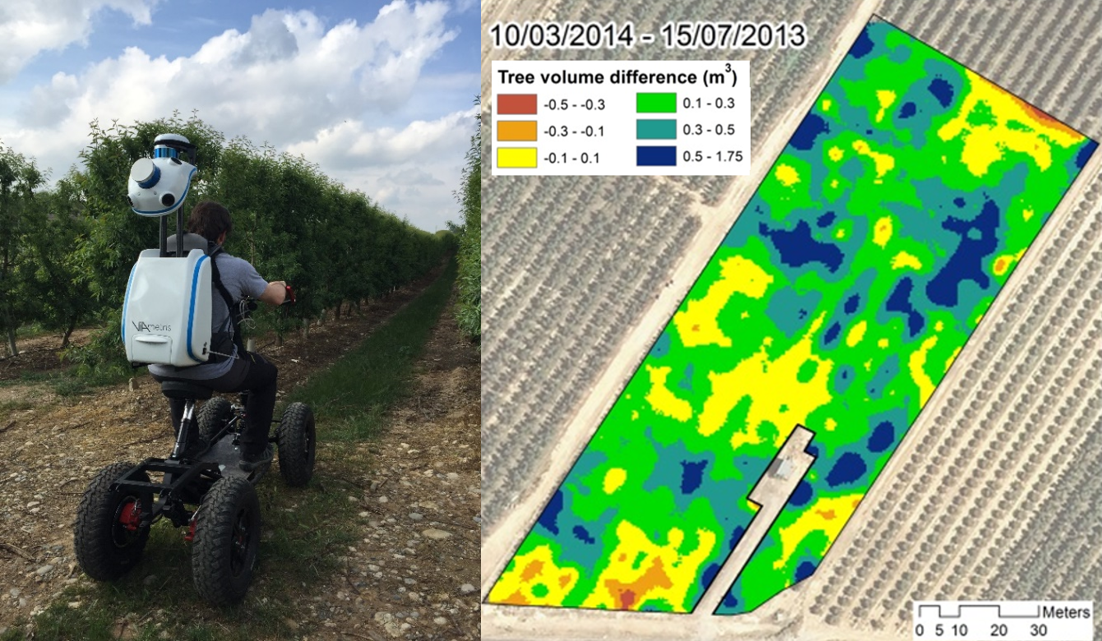
Figura 2. Escàner làser terrestre portàtil Viametris bMS3D basat en sensors LiDAR (esquerra) i mapa de creixement de la vegetació entre dos dates d’escaneig (dreta). Font: Precision Agriculture 18(1), 111-132. DOI: 10.1007/s11119-016-9474-5.
Entre les aplicacions de les dades 3D del cultiu en el maneig agronòmic hi ha les següents:
- Detecció i quantificació de la variabilitat del cultiu a la parcel·la.
- Detecció i localització de problemes.
- Maneig de la capçada a partir de la poda d’hivern o la poda en verd.
- Ajust de la dosi de recursos agrícoles com els productes fitosanitaris, els fertilitzants o el reg.
- Localització de zones amb risc potencial d’infecció de plagues o malalties.
- Detecció de fruits i estimació de collita.
Caracterització del sòl
Una font de variabilitat important del cultiu és el sòl. Si el sòl, en tant que magatzem d’aigua i nutrients, no és uniforme, difícilment el cultiu creixerà uniformement i produirà fruits uniformes. A més, el sòl és espacialment variable de forma natural i aquesta variabilitat no solament és en superfície, sinó també en profunditat.
Una manera de conèixer la variabilitat del sòl de tota una parcel·la és utilitzant sensors que facin mesures sobre la marxa (on-the-go). El GRAP disposa d’un sensor Veris 3100 que mesura la conductivitat elèctrica del sòl a dues profunditats: a) de 0 a 30 cm i b) de 0 a 90 cm. El sistema permet obtenir mesures de conductivitat del sòl georeferenciades, a raó d’una mesura per segon, de manera que la resolució de mostreig dependrà de la velocitat d’avanç i de l’amplada de treball (Figura 3).
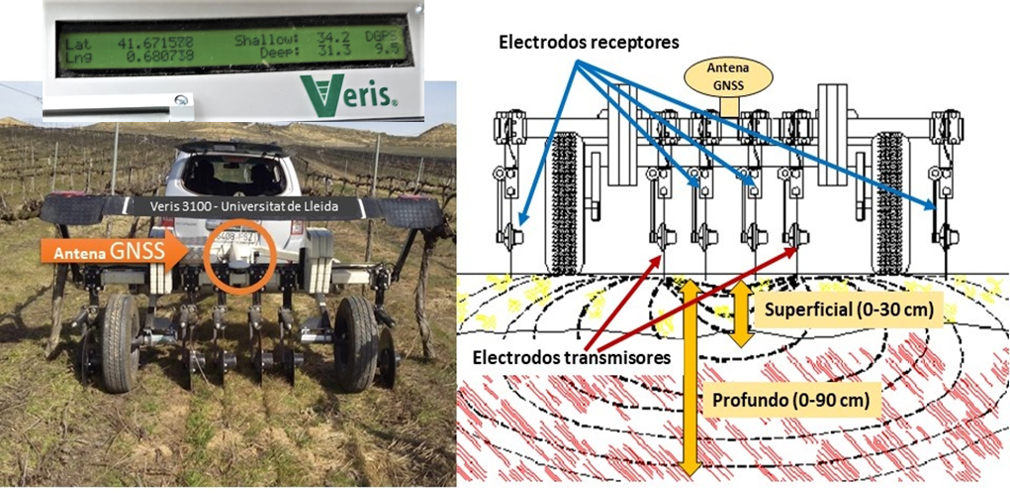
Figura 3. Sensor Veris 3100 del GRAP. Font: Veris Technologies, Inc. Salina, KC, USA.
La conductivitat elèctrica del sòl està relacionada amb el contingut d’aigua del sòl, el contingut de matèria orgànica, la textura, la capacitat d’intercanvi catiònic, la profunditat i el contingut de sals. Per tant, els valors de conductivitat elèctrica del sòl obtinguts no permeten conèixer la composició concreta del sòl en cada punt d’una parcel·la però sí la seva uniformitat (Figura 4). Així, una vegada obtingudes les mesures de conductivitat elèctrica del sòl i sempre amb els coneixements edàfics necessaris de la zona analitzada, es podrà crear una mapa de la parcel·la que permetrà establir zones potencials de maneig específic.
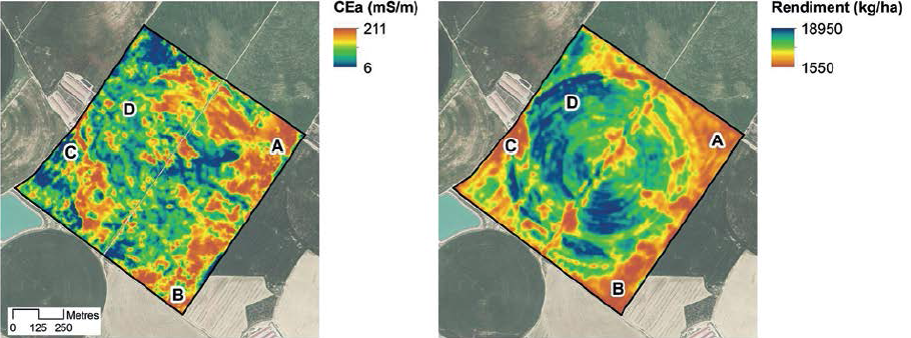
Figura 4. Comparació de la conductivitat elèctrica aparent del sòl (CEa) d’una parcel·la agrícola dedicada a cultius extensius obtinguda a partir de les dades del sensor Veris 3100 (esquerra), i mapa de collita de blat de moro de la mateixa parcel·la (dreta). Les lletres indiquen diferents llocs per a la comparació que es comenten en el text. Les paletes de colors de les llegendes estan invertides per facilitar la comparació. Font: Elaboració pròpia.
Les aplicacions d’aquest tipus de sensors de sòl són les següents:
- Anàlisi de la variabilitat del cultiu.
- Delimitació de zones potencials de maneig agronòmic del cultiu per a
- Reg variable.
- Fertilització variable.
- Sembra variable.
- Delimitació de sectors de reg en funció de la capacitat de retenció d’aigua de cada zona.
- Predicció de la collita, juntament amb dades de vigor del cultiu.
Sistemes automatitzats d'adquisició de dades
En aquesta línia de recerca també s'ha desenvolupat una plataforma híbrida per tal de realitzar tasques d’adquisició de dades associades a l’Agricultura de Precisió, de manera que aquestes es facin de manera més automatitzada i autònoma (Figura 5). La funció principal d'aquesta plataforma és la de poder incloure els sistemes de percepció adients per a poder prendre les mostres necessàries en les diferents observacions que es realitzin sobre el terreny. La presa de dades i la resolució del mostreig s’adaptaran a les necessitats de cada sistema sensorial.

Figura 5. Plataforma autònoma dissenyada treballant en un camp de pràctiques de l’ETSEA.